サイドスキャンソナー「CM2」





特長
- 100~800mの探査レンジ
- デジタル曳航器でクリアな画像を出力
- 目的に応じて選択できる3タイプの曳航器
- 光または同軸選択可能な曳航ケーブル
仕様または構成
| EDF型(325/780kHz) | ||
|---|---|---|
| 周波数 | 325kHz | 780kHz |
| レンジ | 25~150m | 12.5~50m |
| ピングレート | 25.4(25m)~4.8(150m) | 25.4(12.5/25m)~13.8(50m) |
| レンジ分解能 | 39mm | 18mm |
| ビーム幅 (水平x垂直) |
0.3º x 40.0º | 0.2º x 50.0º |
| 俯角 | 10.0º または20.0º ユーザで調整可能(特殊な工具不要) | |
| 最大曳航深度 | 2000m | |
| 重量 | 空中17.1kg/水中11.3kg | |
| 曳航器長 | 1.24m | |
| 曳航速度 | 1-6kt | |
| 温度 | -10~45℃(使用時)、 -20~50℃(保管時) | |
システム構成
ディジタル曳航器(FMチャープ波)

ディジタル曳航器は送受波器を持ったセンサーヘッドです。一定の時間間隔で高周波の音響パルスを放射し、海底からの後方散乱波を受波します。
ディジタル曳航器にはEDF型とDF型の2種類があり、概観はどちらも同じですが、使用する周波数が異なります。
曳航ケーブルを経由して船上ユニットと通信します。
EDF型・・・325kHz/780kHz
ソナートランシーバー(STR)

CM2システムの船上部ユニットをSTRと言います。本機器は曳航ケーブルを通じてディジタル曳航器へ給電し、ディジタル曳航器へコマンドを送ります。
またディジタル曳航器からあがってくるディジタルソナーデータを受け取り、データの収録や表示をするPCへ送信します。
PCとの通信はSTRのUSBインターフェースを使用します。
曳航ケーブル/アーマードケーブル

ソフトケーブル :直径8mm、長さ50~100m。
アーマードケーブル:直径4.7mm、長さ300m。
曳航ケーブルはデータ線と電源線のシングルペアを採用しています。用意されている標準の曳航ケーブルは2種類あります。
ソフト曳航ケーブルは手で運んだり繰り出しが可能で、比較的浅海域での調査において使用します。
アーマードケーブルは外径4.7mmのステンレス鎧装ケーブルで、ウィンチを使って繰り出し、巻き取りを行います。
データ収録/解析ソフトウェア「MaxView」
C-MAX MaxView ソフトウェアはSTR とデジタル曳航器の情報を結合し、サイドスキャンデータの表示、後処理が可能です。GPS レシーバや測深機のように位置や水深情報にも対応しています。
その他の特長:- PC のUSB インターフェース経由でデジタル曳航器やSTR からデータを収録
- 過去の収録データ及びリアルタイム収録データの同時表示
- 航跡確認、サイドスキャンカバレージ、測量計画、ターゲット及び海図画像用のオートスケールプロッタ
- 舵角指示可能な測量計画
- オンライン/ オフラインでの地理座標付されたターゲットモザイク
オプション
C-Shell(STR用防水ケース)

STRの取り付け取り外しなどは簡単に行うことができます。
ディジタル曳航器用ウィングデプレッサ

曳航器は自重による沈降と曳航じのケーブルの引張力とがつりあった深度で航行して運用する事になりますが、船速のコントロールによっては引張力を上手くコントロールできず、曳航深度の制御が難しく、しばしば曳航器が浮上してしまうことがあります。
このウィングデプレッサを曳航器に取り付けることで、ディジタル曳航器の深度を維持し、船速を上げても浮上しにくくなります。
曳航器内蔵型モーションセンサ/深度センサ
運用中の曳航器の方位は進行方向と異なっている場合があります。このセンサを取り付ける事によりターゲットの明確な位置を補正することができるようになります。
方位センサの出力は、ピッチ・ロールの情報が含まれます。これらの情報はデータ処理に使用されるのではなく、調査時に何らかの理由により正しくソナーが曳航されていない可能性がある場合に利用されます。
また、深度センサは曳航器の深度を計測することで、MaxView上でレイバック長を推定し、測線上の深度を計測することができます。
測長計つき滑車(φ16cm、32cm)

測長計つき滑車は曳航ケーブルの繰り出し長をソフトウェアに記録・表示させることができます。これにより調査時に曳航ケーブルの繰り出し長をオペレータが確認でき、安全で効率的な調査に寄与します。
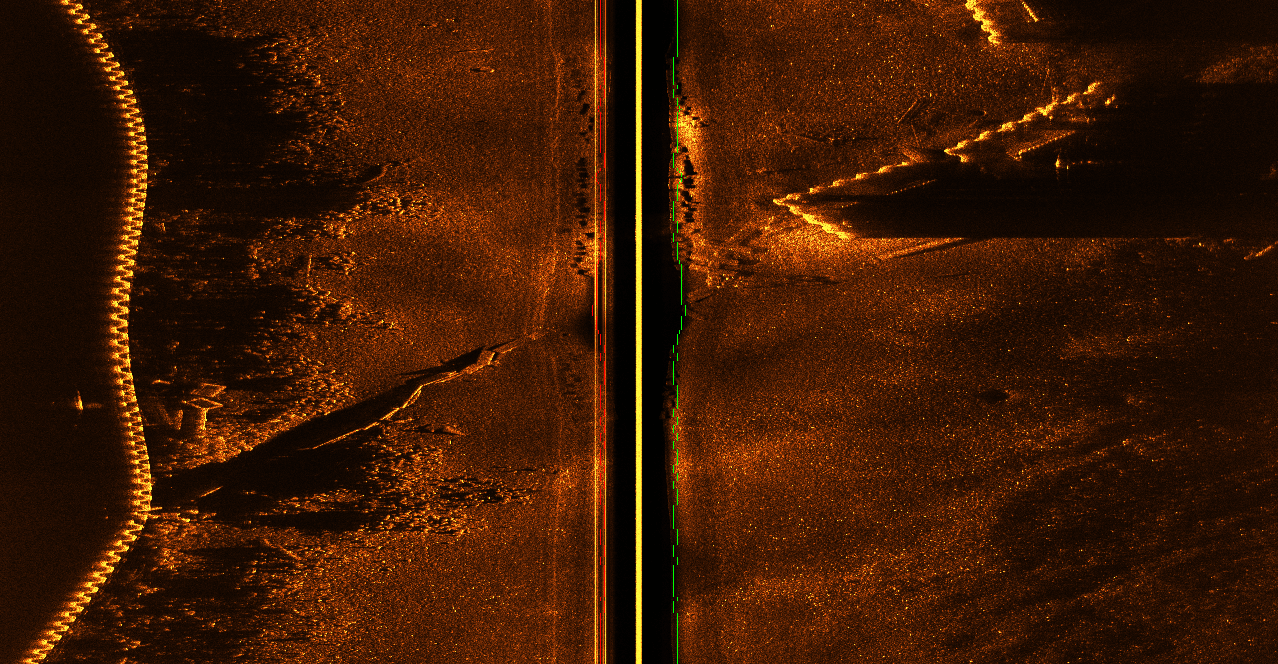
ギャラリー
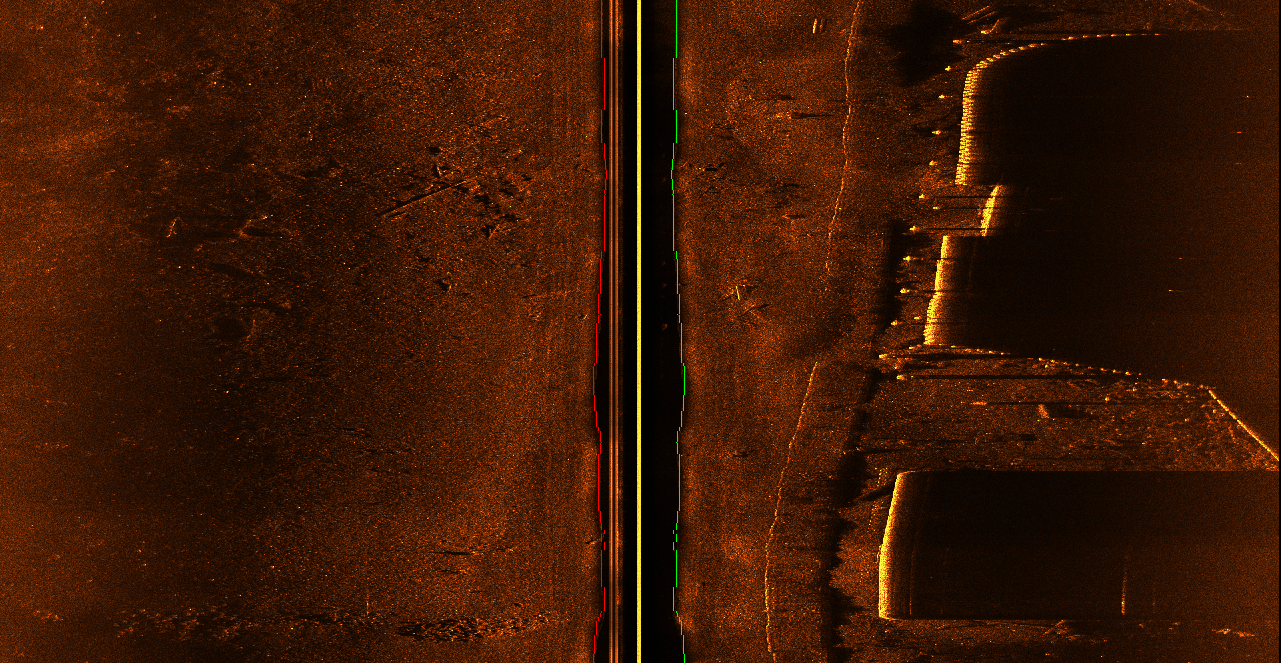
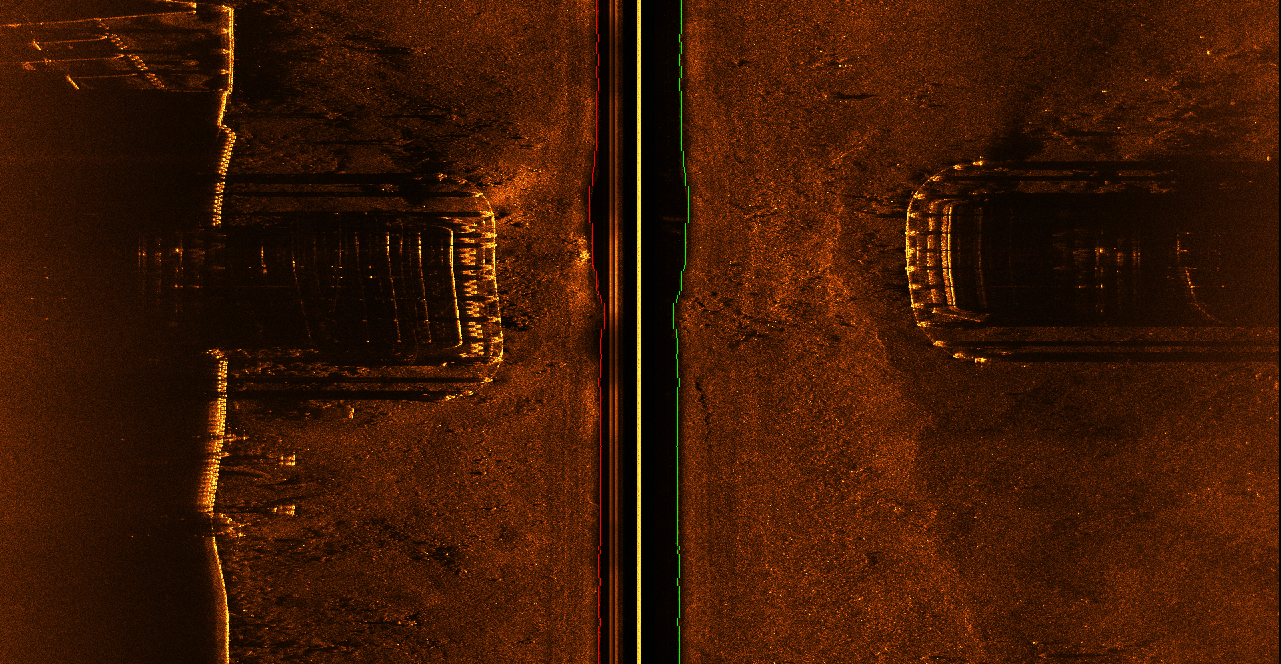
ドイツ、ベルリンで撮影。780kHz、37.5Mレンジ。
コンクリート補強された岸壁と垂直係留杭
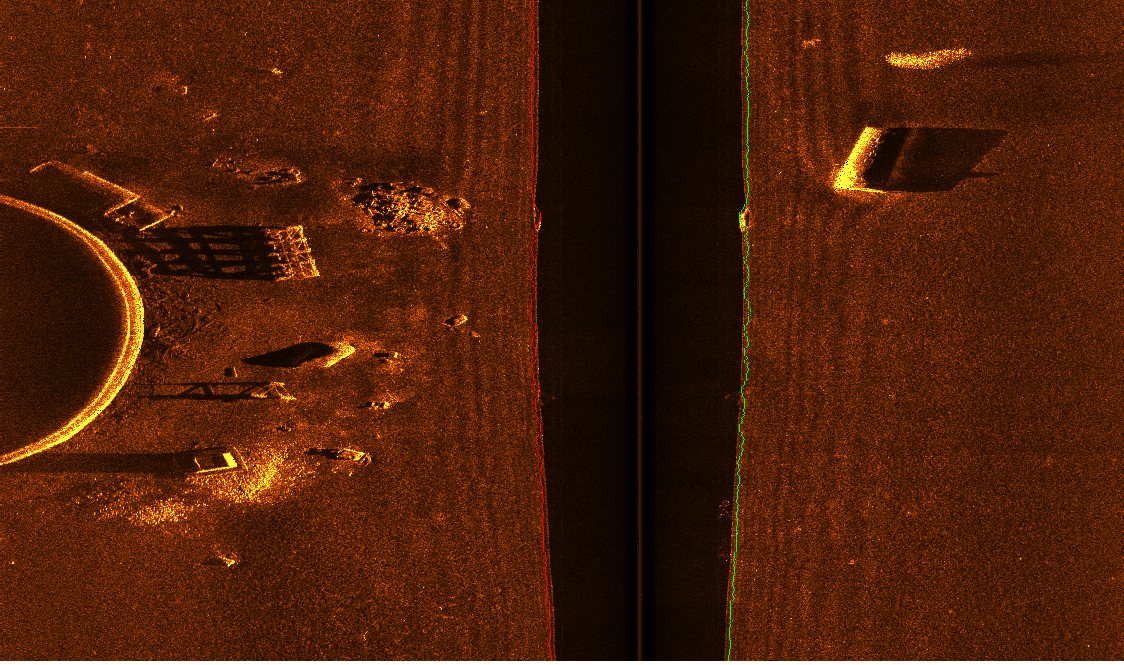
ドイツ、ベルリンで撮影。780kHz、25Mレンジ。
シートが積まれた河川堤防、係留桟橋まで敷設された海底ケーブル
ドイツ、ベルリンで撮影。780kHz、37.5Mレンジ。橋脚
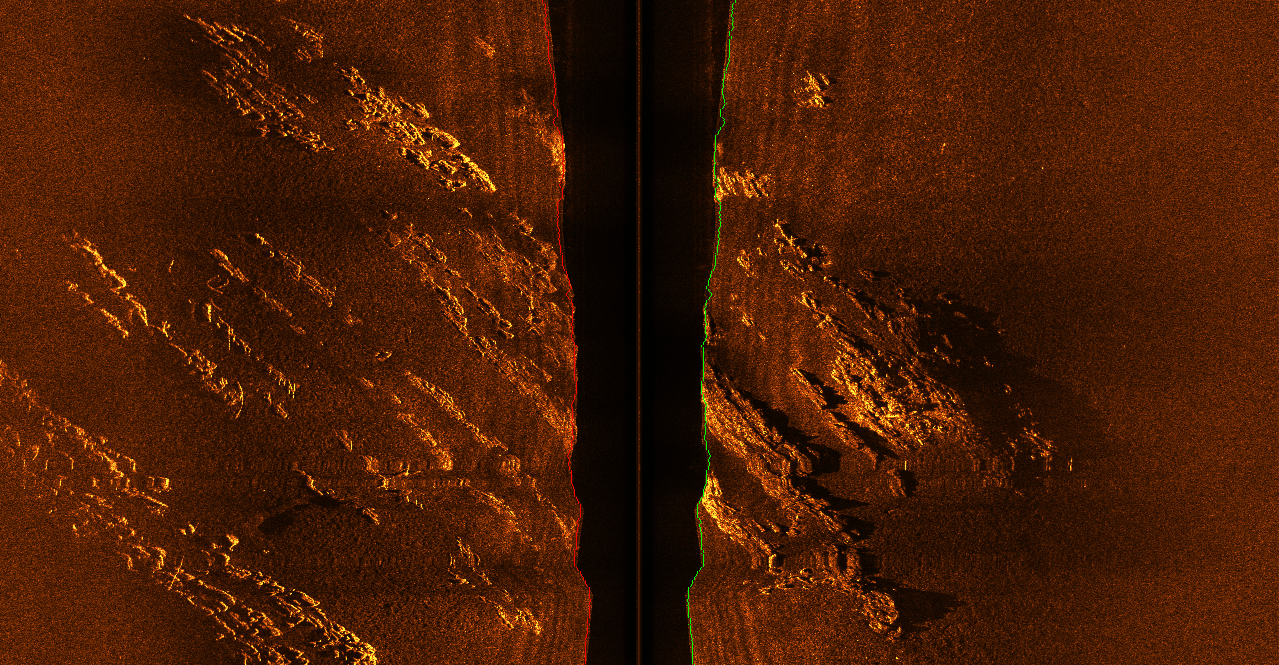
英国プリマスにて撮影。780kHz、50Mレンジ。
海底の岩の露頭。このエリアの海底は細かい砂
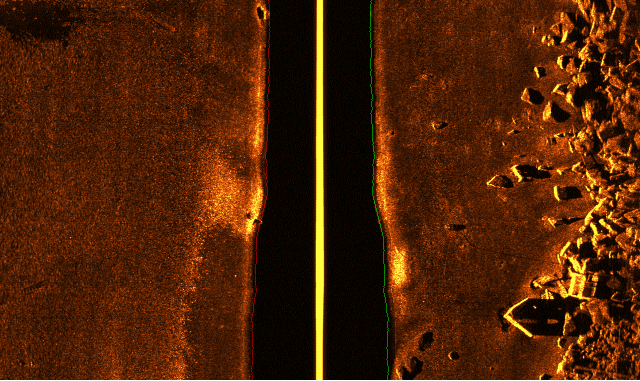
英国プリマスにて撮影。780kHz、50Mレンジ。
Stone Harbour入り口ダイビング・エリア
双胴船
テクノロジー
サイドスキャンソナーの画像ゆがみ(レイバック)とは?
サイドスキャンソナーは、図のように曳航器に取り付けられた送波器からスワス方向に音波を放射し、海底に当たって戻ってくる後方散乱波を順次受波して時系列の信号波形データとして収録します。このとき収録されるデータは「送波してからの時間に対する振幅情報しか持たない」という、きわめてシンプルなものです※1。
通常、この時間情報に関して、送受波器からの直距離が近い物標(地形)ほど早い時刻に音波が到達し、後方散乱が発生します。それゆえ、海底が平らで特に障害物が無ければ、曳航器から遠ざかるほど時間的に後からやってくる信号という事になります。
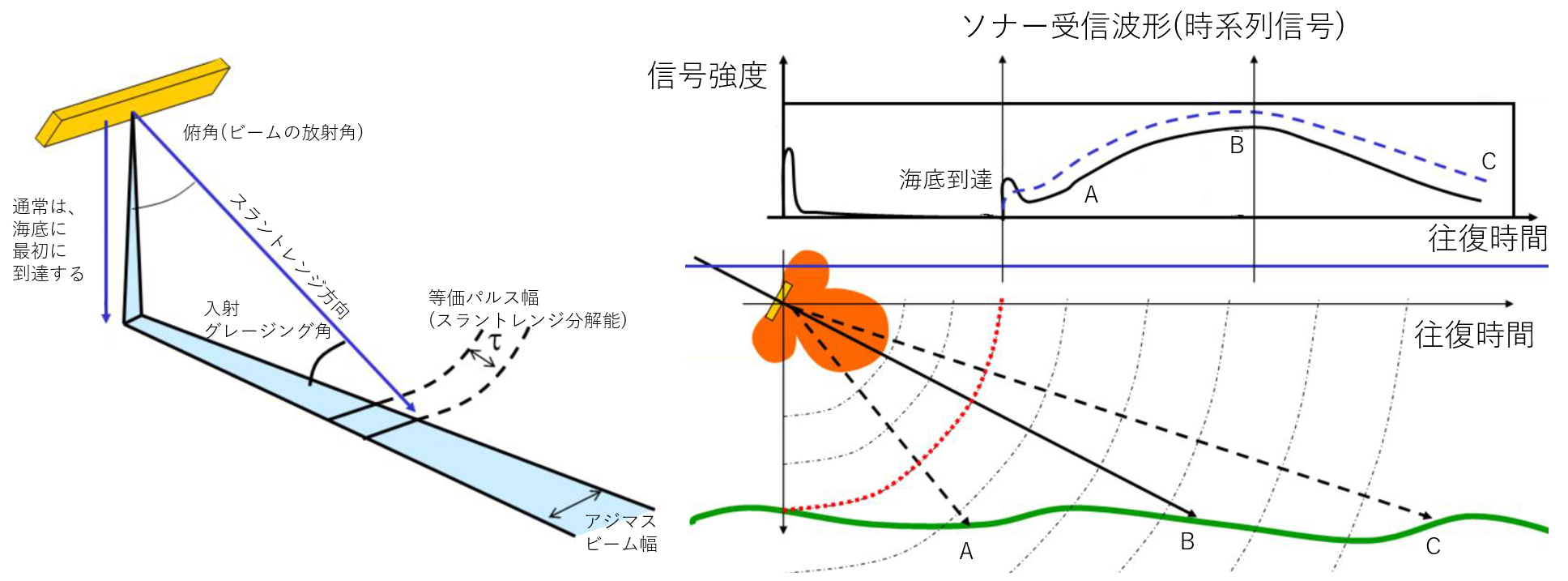
左:ソナーから音波を放射したときのジオメトリ
右:受信される時間波形の例。ABCの音波到達点に対応する後方散乱の強度が時系列の情報となって収録される。ただしこの強度は送受波器からの距離や海底への入射グレージング角に応じて変わるため、必ずしも近くにあるほど強度が強いとは限らない。
※1:
収録時に補助センサーなどのデータを組み込んであれば、方位データや動揺データなどを取り込めるように設定することも可能ですが、曳航器を船から引っ張るだけの単純な仕組みの場合は、曳航器の中に組み込まない限りこれらのデータが入ってくる事はありません。
このため、通常は曳航器の航跡を推定することから、後処理が始まります。
このとき海底の地形が急峻に立ち上がっているようなケースを考えると、送受波器との位置関係によっては手前の海底よりも先に音波が到達するようなケースがあります(逆に、海底に大きなくぼみがあったりすると、くぼみの下側よりも送受波器よりも遠くにある海底のほうに先に音波が到達するようなケースもあります)。
このような場合には、時間波形データとしては本来の位置関係よりも手前(または後方)に凹凸の海底のイメージがあるかのようにデータが記録されてしまいます。
CM2は、レイバックをどのように補正するの?
CM2は弧のような海底地形のゆがみをリアルタイムで補正する技術を持っています。
このために、図のように高度計測のためのピングデータを取得し、それからメインの送波を行っています。
これにより、曳航器の海底高度を計測し、送受波器が海底を向く角度や、内臓の深度センサーから得られる曳航器の深度情報を利用して、レイバックの長さを推定することが可能です。