第4回名古屋オートモーティブワールド
「第4回自動運転EXPO」
開催時間
10:00~17:00
- ●場所
-
ポートメッセなごや 第3展示館 8-28
「世界最高水準の“はかる”技術でクルマの未来を創る」をコンセプトに、 自動運転/ADAS(先進運転支援システム)の研究開発用の各種ソリューションを展示します。皆様のご来場をお待ちしております。
【主催者公式サイト】
第4回名古屋オートモーティブワールド「第4回自動運転EXPO」
https://www.automotiveworld-nagoya.jp/
出展製品のご紹介
V2Xエミュレータ「V2X Emulator」

周辺車両、路側機のV2X信号を無線レベルで疑似し、仮想環境でV2Xアプリケーションの検証が可能です。屋外走行試験を補完し、早期市場投入に貢献致します。C-V2Xにも対応しています。
自動運転/ADAS開発向けデータロガー「ViCANlog pro」

カメラ、LiDAR、レーダーなどの自動運転/ADASで使用されるセンサ信号やCAN、CANFD、LINなどの車内バス信号を同期して保存、再生、解析するためのデータロガーです。
SDKによって解析表示機能を拡張することもでき、保存した実走行データを条件ごとに分類するクラスタリング機能も搭載可能です。
データ収集/解析ソフトウェア「ViCANdo」
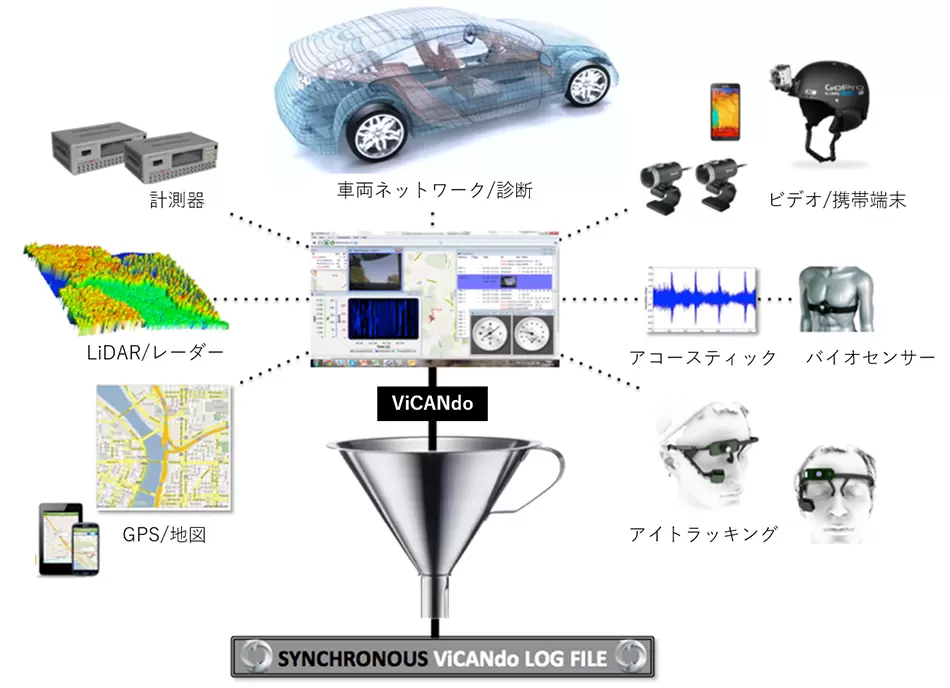
ViCANlogシリーズのソフトウェア部分に相当し、汎用的なPCや高性能PCにインストールしてデータロガーとして使用することや、ViCANlogシリーズで保存したデータを解析するために使用可能です。
コネクテッドカー向け無線通信性能計測システム

3GPPで認可された、GTS社自社開発の手法であるRTS(Radiated Two-Stage)法を用いた自動車の無線通信品質評価システムです。従来の通信性能試験手法を自動車に適用するには様々な課題がありますが、それを克服し、より低いコストで試験することができます。既存のEMC試験用暗室の流用も可能です。
全周360度対応の実写映像再生ソフトウェア「Alpha Node」NEW

360度カメラで撮影した映像を使用し、任意の視点からの映像に変換して再生できるソフトウェアです。CG映像よりもリアリティが高く、高い没入感をドライビングシミュレータで再現できます。実写映像はEuroNCAPやADASカメラの性能検証試験に応用することも可能です。
自動運転システム検証用エコシステム「DMTS2 (Driving & Motion Test System)」
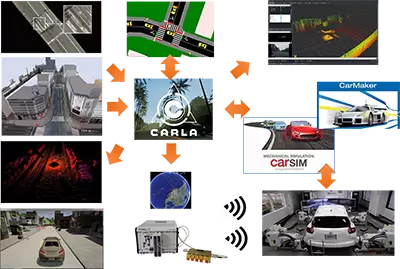
自動運転のアルゴリズム開発や検証のためのオープンソースのシミュレータであるCARLAをベースに、さまざまなシミュレータを連携動作させることで、それぞれのシミュレータの得意な分野のみを使用するエコシステムを構築し、自動運転シミュレーション環境構築から実車両での検証までをサポートします。
周辺環境形状計測システム「XenoLidar X」

世界で初めてLiDARにマルチビームを採用したTrue-solid-state型マルチビーム方式のLiDARであり、可動部分と回転機構を持ちません。壊れにくく、自動車へ導入する際には設置場所の選択肢が広がります。
路面形状計測システム「XenoTrack-RT」

XenoTrackは、LiDARを用いて路面形状を計測するシステムです。センサを車両のルーフなどに取り付け、路面の凹凸をLiDARを用いて計測します。このLiDARは、True-Solid-state方式を採用しており、多点を同時に計測することが可能で、高速走行時でも計測することができます。
非接触式視線計測システム「Smart Eye Pro DX システム」

リアルタイム画像解析ソフトウェアによって、小型高解像度カメラの被験者映像から被験者の頭部運動や視線を計測するシステムです。実車走行時の明るさの変化が大きい環境でも安定した計測が可能です。
入場には招待券が必要となります。
下記公式サイトよりe招待券をお申込みください。
【主催者公式サイト】
第4回名古屋オートモーティブワールド
第4回自動運転EXPO
https://www.automotiveworld-nagoya.jp/