自動運転/ADAS車開発でセンサーデータの同期が必要なワケ
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
自動運転/ADAS(先進運転支援システム)車の開発にはさまざまなセンサーからの情報が必要です。そしてその情報を、同期した一つのデータとして扱うことで車両挙動の分析に役立ちます。ここではその同期についてZuragon社製のデータロガー「ViCANlog」で使用されている原理を紹介します。
自動運転/ADAS車で使用されるセンサー
自動運転/ADAS技術を実現するため、車両にさまざまなセンサーを搭載し研究開発が進められています。代表的なものとしては、カメラ、LiDAR(光による検知と測距)、ミリ波レーダーや、自車両位置を確認するためのGPS、自車両の姿勢を検知するためのIMU(Inertial Measurement Unit)といったセンサーが使われます。また、CAN(Controller Area Network)のような車両ネットワークからの車両情報も重要です。
データロガーの必要性
このように異なる種類のセンサーで取得したデータにはそれぞれ重要な情報が含まれており、これらのデータは自動運転/ADAS車の開発には必要不可欠となります。この情報を収集・分析し開発に役立てるものとして重要なのがデータロガーです。
各センサーからの情報の同期
各センサーで取得したデータは固有のフォーマットで記録され各データは独立しています。分析を行うためには、記録された各データの同期がとれた状態である必要があります。記録されたデータの同期がとれていることで車両の挙動分析が容易となるのです。
例えば、車両が急ブレーキをかけたときに、加速度センサーの数値データにより急な速度の変化など車両の状態がわかります。これにカメラ映像を加えることで、数値と映像により精緻な車両の挙動分析が可能となり自動運転/ADASシステムの開発を行えます。
Zuragon社製データロガー「ViCANlog」による同期
Zuragon社製「ViCANlog」は、CAN、ビデオカメラ、GPS、LiDARなど種類の異なるセンサーを接続しデータを記録します。記録された各データは「ViCANlog」が持つロジックにより同期がとれた状態で表示・再生ができます。収集したデータを簡単に再生して分析できるのです。
これを実現するためZuragon社では、あらかじめ各センサーで取得したデータの送信タイミングなどを検証し「ViCANlog」上での動作の認定をしています。認定されたセンサーは、全ての過程で遅延などが測定され、タイムスタンプ(電子的な時刻証明)を付与したデータをログファイルとして保存します。この技術によりほとんどのセンサー間の偏差が1μs(マイクロ秒、100万分の1秒)となります1)。
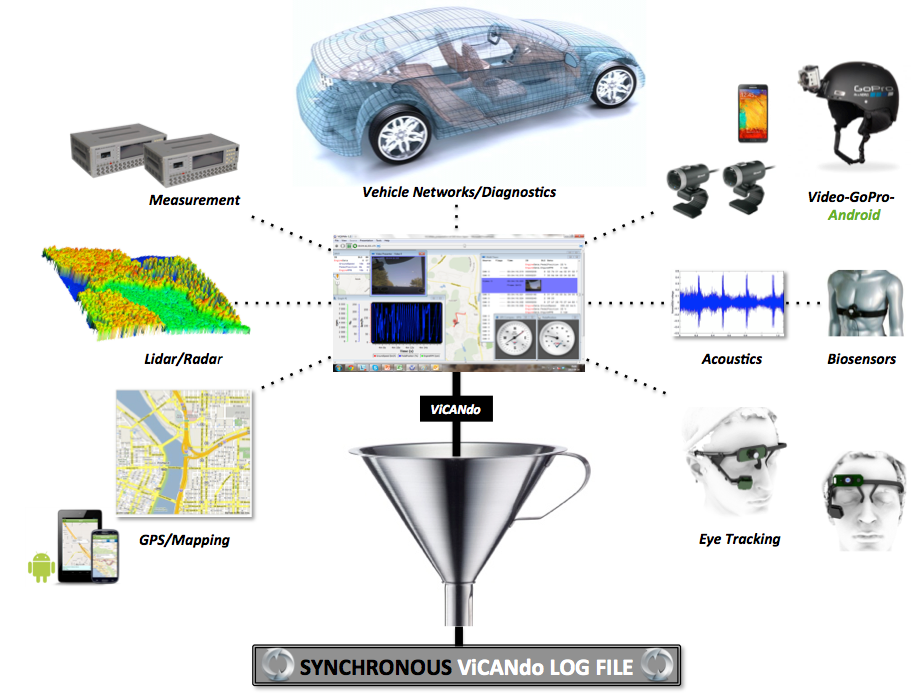
図1:各センサーデータの同期イメージ
センサーデータ間の同期
「ViCANlog」には各センサーのデータの送信タイミングを常に監視するロジックが組み込まれています。これにより記録された各データの再生や、ドリフト(時間の経過に伴う変動)などの補正も行われます。
「ViCANlog」は各センサーで生じる遅延の差を吸収するため、ログの記録開始前に接続されているセンサーに対し信号を送信しあらかじめ遅延を計測しておきます。測定した遅延情報をもとに、マスターとなるセンサーを決定し、他のセンサーはマスターセンサーとの遅延差をオフセットして計算されます。
「ViCANlog」では以下のように複数の手法により収録されたセンサーデータの同期をとります。
・レイテンシー(通信の遅延時間)の計測
・PTP(時刻同期プロトコル)技術による時刻調整
・GPSからの正確な時刻情報取得
それぞれについて説明します。
レイテンシー(通信の遅延時間)の計測
カメラ、IMUなどUSBやCOMポートに接続されているセンサーのデータを「ViCANlog」で受信するまでのレイテンシーや、ドライバーなどによる処理、ログファイルとして保存するまでの内部遅延を計算します。車載CANからのデータの受信については、Kvaser社製やVector社製のUSB/CANインターフェースを用います。受信したCANからのデータにタイムスタンプを付与し「ViCANlog」でレイテンシーやデバイスの内部遅延時間を計算します。
ビデオカメラの場合データ量がとても大きくなるため、伝送遅延が発生する可能性があります。そのためSync Delay(同期化遅延)と呼ばれるバッファ(保存領域)を設定することで、遅延を吸収しビデオデータとその他のデータを同期させます。
PTP(時刻同期プロトコル)による時刻同期
IEEE 1588規格のPTP技術を用います。「ViCANlog」をマスタークロック、イーサネットポートに繋がれるLiDARをスレーブ(従属装置)とし、「ViCANlog」の時刻に全てのセンサーの時刻を合わせます。時刻同期されたことでセンサーのデータを受信するまでのネットワーク遅延時間を計算します。この手法で高精度な時刻を取得することはできますが、接続される全てのハードウェアがPTPに対応している必要があります。
非PTPのハードウェアは事前にZuragon社で検証する必要があります。検証によりデータ同期が可能なセンサーとして認定されれば、発生しうる遅延、各センサーからのデータ受信のタイミング動作が保証され、アプリケーションに組み込まれます。これによりPTPおよび非PTPハードウェアが混在したシステムで時間を調整することが可能となります2)。
GPSからの正確な時刻情報取得
GPSを「ViCANlog」に接続しGNSS(全世界測位システム)などからの時刻を「ViCANlog」のクロックとして利用することで、より正確な時刻を使うことができます。GPSの時刻を用いることで、複数ユニット、または車両が同じ時刻を参照します。さらに、今後実装される予定の「ViCANlog」のマージ機能により、同じシーンにおける異なる車両データの分析も可能となります。
自動運転/ADASシステムの開発は一般車両、公共交通や物流などの利便性や人手不足の解消、コストの削減には欠かせません。一方、交通弱者と言われる地方の過疎地域に住んでいる、または自動車免許を持たないなどの「移動制約者」や、「交通事故に遭いやすい」子供や高齢者にとってもこの技術はより欠かせないものとなっています。今後全ての人が自動運転/ADAS技術のメリットを実感し恩恵を受けることができる社会となっていくことが必要です。
1)Zuragon社特許
Method and system for context and content aware sensor in a vehicle:US20200174474A1(US) / SE1851493A1(EU)
2)Zuragon社特許
Method and system for calibration of sensor signals in a vehicle:US20200122740A1(US) SE1851273A1(EU)
