水産業における 近年の技術向上とその利用
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

はじめに
水産資源、つまり「魚がどのくらいの量いるか」を遠隔的に把握する手法があれば、どんなによいでしょうか。具体的には、「いつ、どこに、どんな種類でどのくらいの大きさの魚が、何匹いるか」といったところです。このことは、裏を返せば予測にもつながるため、「明日、ここに網を仕掛ければ、いくらの儲けになる」とか「今週は、価格が安い小さな魚しか出ないから、網の修理をしよう」と予定を立てることが、漁師の判断でできるかもしれません。これらは水産資源の「自主的な」利用・管理につながると考えられます。
しかし、魚のような移動物体の予測は難しいのが現状です。陸上の技術に例えるのであれば、渋滞予測や気象レーダーなどでしょう。長期休みの時期には、高速道路が、どこで、いつごろ、どのくらい渋滞するかが情報として配信されます。しかし、車種や大きさといった詳細な情報は、必要性が低いため今のところ一般には公開されていません。また、高速道路のような「決まった道」が海中に存在するのかと問われれば、今のところ明確な「魚の通り道」は、暖流と寒流がぶつかり合う潮目くらいしか我々は把握していません。一方で気象レーダーは、最近は分単位での予想を配信しており、携帯電話(スマートフォン)への豪雨情報の配信なども行われています。その配信内容は、「現地点で何分後に数十ミリの雨が見込まれるため、注意が必要」といったところでしょう。これは、複数の地点で気圧の変化や、降雨量の計測などを実施して、予測までを実現しているということです。
両者の技術に共通しているのが、多点での精密観測結果を利用・活用して予測を行っている点です。複数の地点で移動物体の連続的な観測を行い、結果を複合して予測につなげています。つまり移動物体の予測を行うためには、多点での高精度モニタリングが必要です。話を海洋に戻すと、「海中の天気予報」というものが、実は存在しています。一部を紹介すると、JAXAひまわりモニタ1)や、日本近海の海洋変動予測システム(JCOPE)2)、太平洋および我が国周辺の海況予測システム(FRA-ROMS)3)などです。各予想サイトでは、モデルや観測データに違いはありますが、多地点での観測を行い、水温、塩分などの変動予測につなげています。また、緯度経度(水平方向)だけでなく、深さ方向も含めた鉛直分布も算出しています。これらは「魚の通り道」を把握する上で、有用な情報につながると言えます。
本稿では、水産業における現状の技術向上などを紹介しながら、今後の展望・希望を述べていきたいと思います。
モニタリング技術の発展
海洋のさまざまな動向を把握するための調査船は、目的に合わせた幅広い種類の調査を実施しており、高い精度でのモニタリングを実施しています。水産資源の増減傾向の把握や、海洋動態の把握、新規機器・調査手法の開発など、調査海域、時期、船に合わせて調査内容を入れ込んでいます。これらは、決まった期間を各研究チームで確保して実施していますが、悪く言えば、研究者同士で調査期間・船の奪い合いが起きているのが現状です。そのため調査船などを使用せず、観測点数の増加、つまりは無人観測技術の向上が望まれており、すでに無人船(Unmanned Surface Vehicle:USV)などの技術発展も多く報告されています。ここで、発展してきた技術と応用例をいくつか紹介します。近年、ドローン技術が発展してきており、その技術は、水産業にも活用されてきています。例えば、魚影を狙った鳥影探索への活用などです。以前はヘリコプターなども使用していましたが、それが新技術に置き換わり無人化に近づいています。
無人化の極みとしては、自律型海中ロボット(Autonomous UnderwaterVehicle:AUV)による調査であると考えます。AUVは、現在複数機の同時運用を実現しており、探索範囲の広域化を可能にしています4)。コンピュータと動力源を内蔵するAUVは、周囲の状況を判断し、自律的に行動するロボットです。電力を常に供給可能な遠隔操縦機(Remotely OperatedVehicle:ROV)よりも運用コストは低いと言えます。どちらの潜水機も計測に使用する機材を選択でき、深海まで探索を行えるため、調査船での調査よりもはるかに多くの情報量を得られます。AUVの課題は、使用する機材の消費電力と探索範囲(潜水機のバッテリー)のバランスを考慮した調査計画が必須であることや、投入可能な調査船が必要であることです。水産業への応用の可能性としては、養殖産業への参入など、比較的狭い調査範囲への適応の期待が高まっています。
同じく無人機のWaveグライダーや水中グライダーなど自律型海洋プラットフォームの技術も近年発展してきました。Waveグライダーは、波の力を推進力に変換して航行し、衛星通信を介して、取得データの転送を行えます。水産業への活用としては、2010 年代より提言がされており、調査船と同じ4 周波の計量魚群探知機(以下、計量魚探)を搭載した曳航体をWave グライダーで曳航して調査を行うものでした5)。調査船を製作して運用するよりも、圧倒的なコスト削減(金銭、時間共に)につながるため、調査速度を上げることはできませんが、複数の観測システムを同時期に運用することで、調査範囲の拡大につながります。また、Waveグライダーは、通信局が常に水面にあるため、比較的安定的な通信を行える一方で、波浪や天候の影響を大きく受けます。ただし、モーターのような動力を必要としないため、静音なデータを取得でき、クジラなどの鳴音の探知・観察などにも活用されてきています。
一方、水中グライダーは内部の電池重量などを利用し、重心位置を変えて水中の姿勢を制御して前進・潜行します。水面に出たときに通信を行い、観測データを陸上へと送信します。グライダー自身が潜行するため、海中環境の微細構造を把握可能です。また、魚群に近づくこともでき、深場の魚の詳細な観察・計測が実現可能です。グライダーに装備する魚群探知機(シングルビーム)の較正方法を提案して実際に運用したり、複数の計量魚探を装備して調査を行ったりした報告もあり、無人観測システムが構築されつつあります6)。
海外では、USVの一種であるセイルドローンを用いた調査が実用化に近づいています。セイルドローンは、風力と太陽光を動力として、数ノットでの航行が可能なシステムです(図1)。アメリカ海洋大気庁(National Oceanicand Atmospheric Administration:NOAA)は、本システムを用いてベーリング海において97日間の調査を行いました。風、水温、塩分など表層環境だけでなく、スケトウダラの現存量推定のための、音響調査も実施しました7)。このシステムの運用形態は、研究者の所望する調査計画をベースに、実施可能なプロトコル提案を行い、我々研究者は「データを購入する」イメージです。公海などの科学データを共有できる海域での実施は、有用であると考えられますが、海洋資源などの国益が絡む場合は、データの所有権に考慮が必要であると指摘されています。

図1:セイルドローン(https://www.saildrone.com/galleryより引用)
前述の通り無人観測システムを導入することは、観測点の増加やコスト削減など多くのメリットがあります。ただし、これらの観測システムにはデメリットもあるため、運用する上で注意も必要です。また、これらのシステムは、離れた場所での複数観測を同時に実施可能なことから、今までは困難であった、地域ごとの動態把握など新たな調査手法も可能となるでしょう。しかし、無人計測では把握しにくいこともあります。それが、音響を用いた魚種の判別です。現状では、魚種や魚体長(サイズ)の確認を、網を用いた漁獲に頼っています。従来の調査手法との併用と、観測範囲拡大のための調査手法の調整が必須です。
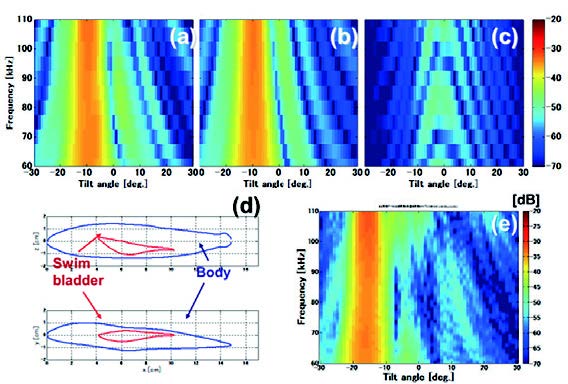
図2:マイワシの反射波の音色のパターンの理論値と実測値縦軸が周波数、横軸が音の入射角度、色で強さを表します。魚体と鰾からの理論散乱パターン(a)、鰾のみ(b)、魚体のみ(c)、計算に使用した鰾と魚体形状(d)、実測値(e)を示します
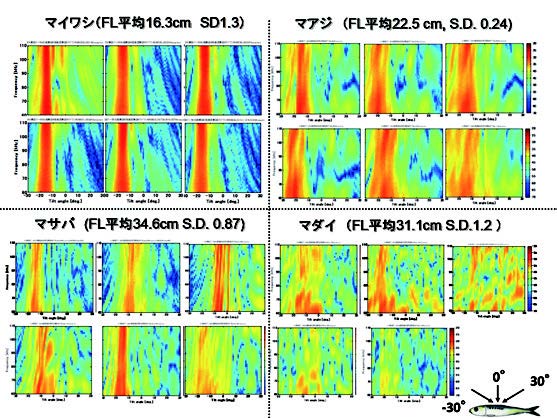
図3:4魚種の音色のパターンの実測値
センシングの高度化
魚の量を算出する計量魚探は、広帯域化が世界的に進んでいます。計量魚探を用いた調査は、1980 年代後半から多周波での狭帯域計測が主流になり、プランクトンなどと魚類の判別が盛んに行われてきました。これは、使用する音波の波長と、測定対象のサイズに依存した反射率の違いを活用しています。また、1990 年代になると、ビーム数を増やした定量的な計測、つまり計量魚探のマルチビーム化などが行われてきました。2000 年序盤ごろからは、広帯域システムの実用化に関する研究が多数実施されてきました。筆者らも広帯域音波の活用に関する研究を行ってきました。以下にその一部を紹介します。
単一の周波数、狭帯域での計測では、得られる情報に限界があります。具体的には、対象からの反射波には、振幅成分である「音の大きさ」を計測するのが主体でした。水産分野への広帯域音響技術の応用は、1980 年代から提案されていましたが、送波レベルの問題や、定量観測の問題点などがありました。広帯域化するメリットは、「対象のみに依存した音色の計測」が実現可能な点です。図2に例を示します。マイワシの散乱特性を広帯域でモデル計算した結果(図2(a)~(c))と、水槽で精密測定した結果(図2(e))です。複数周波数での音色のパターンを示したものであり、対象への音の入射角と反射成分の強さを表します。広帯域化することで、それぞれの周波数に依存した特徴が出てきます。魚からの反射は、主に鰾(ウキブクロ)によるもので、そこに魚体形状などの影響が付加されます。また、鰾・魚体形状は、魚種が変われば異なります。理論値と実測値の傾向がよく一致しているのが分かります。
図3に複数魚種の実測例を示します。個体差もありますが、種差のほうが大きいのが感覚的に分かります。広帯域の定量観測は、音色の違いを情報の一つとして活用することで、水産音響における一つの課題を緩和・解決できると考えています。広帯域化された計量魚探は、前述の観測プラットフォームにも既に装備されています。広帯域音響データの解析結果の吟味などの課題はありますが、近い将来に「いつ、どこに、どんな魚が、どのくらいの量いたか」は分かるようになるのではと思っています。
おわりに
本稿では、水産業を取り巻く技術発展、新しい観測プラットフォームや、センシングにおける新技術を紹介しました。これらの技術はどの業界においても有用なものであると考えます。個人的にはエンジニアリングは、漁業者などの一般の方々に還元する必要があると感じています。「技術」と「人間の要望や欲望」のバランスを取りながら、これらの技術を活用し、研究を行っていきたいと考え、本稿を締めたいと思います。
参考文献
1) https://www.eorc.jaxa.jp/ptree/index_j.html
2) http://www.jamstec.go.jp/jcope/
3) http://fm.dc.affrc.go.jp/fra-roms/index.html
4) 文部科学省,研究開発局海洋地球課“ 今後の深海探査システムの在り方について(” 2016)
5) C. H. Greene et. al. “A Wave Glider Approach toFisheries Acoustics,” Oceanography, 27,( 4), PP168-174,( 2015)
6) Moline Mark & Benoit-Bird, Kelly. “Sensor Fusionand Autonomy as a Powerful Combination forBiological Assessment in the Marine Environment,”Robotics. 5. 4. 10.3390/robotics5010004.( 2016)
7) C. W. Mordy et. al. “Advances in EcosystemResearch: Saildrone Surveys of Oceanography,Fish, and Marine Mammals in the Bering Sea,”Oceanography, 30,( 2), PP 113-115,( 2017)
著者紹介

水産研究・教育機構 水産技術研究所 環境・応用部門 水産工学部 漁業生産工学グループ 主任研究員
今泉 智人
1979東京都生まれ。東京水産大学卒業、東京海洋大学海洋科学技術研究科博士後期課程修了、工学博士。2008年4月から水産総合研究センター水産工学研究所に勤務。2020年7月、組織改変に伴い、現在の所属となる。専門は水中音響。