小型無人船を使って 沈没艦船を探索・調査する
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
はじめに
筆者は、長年無人船研究の第一人者として世界の研究をリードしてこられました。現在もプロジェクトが進められている戦略的イノベーション創造プログラム(SIP)の次世代海洋資源調査技術(「海のジパング計画」)における最新の無人船運用技術開発の“今”をご紹介いただくとともに、ご自身が代表を務められる一般社団法人ラ・プロンジェ深海工学会での活動報告、そして2021年6月に予定している、1944年11月7日に北海道・恵山の沖合にて沈んだとみられる「アルバコア(SS-218)」の捜索プロジェクトについてご紹介いただきます。
なぜ海洋調査は進まないか
2017 年私が首席研究者だった海洋研究開発機構(JAMSTEC)の深海調査研究船「かいめい」の航海(航海番号:KM17-11c)は、10月26日に横浜を出航、台風に行く手を阻まれ、自律型海中ロボット(AutonomousUnderwater Vehicle、以下AUV)を展開して調査する伊平屋北熱水フィールドに到着したのが11月3日。3回の潜航を行い、11月6日に横須賀港へと戻りました。12日間の航海で目的とするロボットの潜航調査日は、たったの3日、それも日中だけです。建造コストも運用コストも高い調査船を使って、このように効率の悪い調査をしているようでは、海洋調査は遅々として進まないことは誰の目にも明らかです。海洋調査の非効率性という海洋関連研究のボトルネックを打破するために、AUVの特徴を活かして、複数AUVの同時展開が必要と私は主張してきました。2012 年に最初の試みとして、「AE2000a」、「AE2000f」、および「Tuna-Sand」という3 台のAUVを伊豆諸島のスミスカルデラに同時展開しました。3 台を同時に展開すれば、作業効率は3 倍になります。10 台展開すれば10 倍になるのです。複数AUVの同時展開で効率を上げることは、海底資源を調査する組織にとって魅力的です。そこで、2014 年から始まった戦略的イノベーション創造プログラム(SIP)では、この開発を課題の一つとし、今や複数AUV 同時展開は常識になりつつあります。

図1:スミスカルデラに展開した3台のAUV
無人船の魅力
多くの船員を必要とする現状の調査船や支援船を利用していては、人件費だけでもばかになりません。無人船(Unmanned Surface Vehicle、以下USV)を利用して調査を行えば乗組員の人件費は不要です。自動車の自動運転研究開発が進んでいるように、船の無人運航については、世界中で研究開発が始まっています。大型船ばかりでなく、河川、港湾やダム湖の深浅測量を小型の無人船で行うことも視野の内です。しかし、複雑な船上作業があり、また、臨機応変に作業やスケジュールを変える海洋調査船が無人化するのはしばらく先でしょう。現状の調査船を無人船でリプレースするのではなく、無人船でできることは無人船でやればよい、という考え方が重要です。例えば、時間がかかり単調な作業であるマルチビームソナーによる海底地形の計測は、全自動で動く無人船でやればよいのです。先に述べた複数AUVの同時展開のような場合は、AUVの行動を監視するのは無人船が行えばよいでしょう。簡単なゴムボートの運転を自動化すれば、AUV達に支援船がついて行く必要がなく、支援船は別の調査活動ができます。先に述べたSIPでは、そのような機能を持つ無人船が開発されています。


図2:高解像度マルチビーム測深機「Sonic2024」を搭載可能な無人ボート「EchoBoat-240」
USVの法的課題
国土交通省は告示を出し「長さ三メートル以上又は推進機関の連続最大出力が一・五キロワット以上の小型船舶であって、遠隔操縦により人が制御できる機能を有するもの」を船舶安全法施行規則第一条第四項に加えました。従うべき規則を小型船舶安全規則ではなく、特殊船に関する規則としたのです。自律型の無人船は遠隔操縦しないので、該当しないとも考えられますが、実海域運用において遠隔操縦的な要素が全くないとは言い切れません。AUVの研究者である私は、AUVについての法律に関係する議論を避けてきました。とてもややこしく、かつ特殊な例であると考えるからです。しかし、無人船については避けて通れないのが現状であると思います。海上保安庁が1980年代に開発した無人船「マンボウ」を「自航式ブイ」と呼んだのも、難しい議論を避けるために「船」ではないとしたと考えられます。日本大学の南 健悟氏が、「無人船舶の航行と海上衝突予防法」と題して「海事交通研究」第66 集(2017 年12月)に詳しく議論しています。無人船が活躍するようになれば、現実に即した規則が充実していくものと考えられます。
アルバコアを求めて
話は変わって、私たち(一般社団法人ラ・プロンジェ深海工学会)は、東陽テクニカをはじめ、多くの組織やボランティアの協力、クラウドファンディングや個人的なつてからの寄付金を得て、一般の方々の海洋調査や海洋活動についてのリテラシーを上げるために、2017 年から沈没艦船の探索、調査をしてきました。調査活動は、インターネット経由で生配信されました。普通には見ることのできない海洋調査活動や調査機器、さらには海底の沈没艦船の画像を、ライブ配信サービス「ニコニコ生放送」を通じて提供しました。五島列島沖合の日本海軍の潜水艦24 艦の調査には300トンの作業船、戦時徴用船「大洋丸」の調査には8,000トンのケーブル敷設船の遠隔操縦機(Remotely Operated Vehicle、以下ROV)を利用しました。二つの調査とも、それ以前にマルチビームソナーのデータを得ていたので、時間のかかるマルチビーム調査をする必要はありませんでした。しかし、2018 年に行った若狭湾に沈む「呂500」潜水艦の調査では、マルチビームを使って海底に艦影を探す必要がありました。本格的な船舶を利用するには経費がかかるため、漁船をチャーターしました。広い若狭湾の全域を調べるとなると気の遠くなるような作業になり、経費もかさむなあ、と心配でした。しかし、比較的短期間で発見することができ、大変幸運でした。次の探索ターゲットは、函館の東、恵山の沖に沈んでいるはずのアメリカ海軍の潜水艦「アルバコア(SS-218)」です。アルバコアは、1944 年11月7日に恵山の沖合にて触雷して沈んだとされています。目撃情報があり、おおよその位置は分かっています。しかし、沈んだ艦の確認は行われていません。私たちは、これを東陽テクニカ提供の無人船に取り付けたマルチビームソナーで探し出し、発見すれば中型のROVを潜らせて確認しようと計画しています。海底のマッピングを効率化して探し出す計画にしていて、できることなら、2021 年6月に、地元漁協の協力を得て行う予定です。日本の沿岸には多くの艦船が確認されないままに沈んでいます。新しい無人船技術や音響技術を使って、少ない経費で探し出すやり方のひな形をアルバコアの探索によって示したいと考えています。ご期待ください。
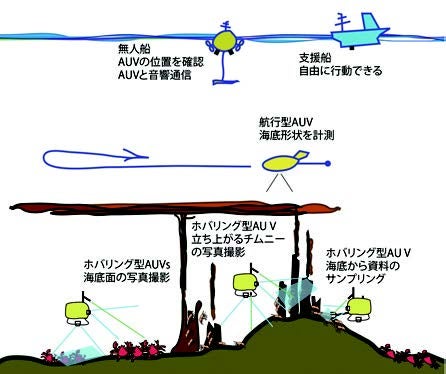
図3:SIPプロジェクト「次世代海洋資源調査技術」の概念図
著者紹介
一般社団法人ラ・プロンジェ深海工学会 代表理事
浦 環
東京大学 名誉教授。一般社団法人ラ・プロンジェ深海工学会 代表理事。国立研究開発法人海洋研究開発機構 招聘上席技術研究員。日本の自律型海中ロボット研究の第一人者。