深海自律型無人探査機のこれから
海洋立国を支える技術により、世界で6 番目という広大な海を調べ、利用していきたい
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
はじめに
いま、深海の利用といえば、「海底鉱物資源」がホットなトピックの一つです。戦略的イノベーション創造プログラム(SIP)の課題の一つに採択された「次世代海洋資源調査技術」は、平成31年以降に民間による資源調査が実施できるような技術開発を行い、海洋資源調査産業を創出しようとするもので、様々な深海技術が凝縮されたプロジェクトです。筆者はこのプロジェクトで自律型無人探査機(Autonomous Underwater Vehicle: AUV)の複数機運用化を担当させていただいている事から、 AUVの紹介、次世代海洋資源調査技術におけるAUVの役割、そして多分に個人的視点による今後のAUVの展開についての妄想を書かせていただく事にします。
自律型無人探査機
AUVとは鉄腕アトムの海洋版、と言ったらイメージがつかみ易いでしょうか? AUVは人が乗らない自ら律して行動できる海中を調査・探査するロボットを言います。しかし、アトムのように頭が良いわけではありません。行動予定が書かれたプログラムに従ってミッションを遂行する事が主で、想定通りの障害があった場合にはそれに対応できる自律プログラムが加えられている程度です。つまり、開発者が予測していない事には対応できません。現時点では、「はやぶさ」のように監視が必要だという事です。また、海中では流体抵抗を下げなければエネルギー効率が悪くなってしまう事から、形状が潜水艦のようになります。このような速く走る事を目的としたロボットを巡航型AUV(図1)と言っています。
AUVに搭載される主な観測装置には、海水の物理定数である伝導度・温度・深度を計測するセンサ、海底表面や海底下を可視化するソーナーなどがあります。これら観測装置を駆使したAUVの用途は、詳細な海底地形図を作る事や環境情報を三次元計測する事です。海底地形図は海底鉱物資源の調査はもとより、地球ダイナミクスの研究、有人潜水船や遠隔操作型無人探査機のプリサーベイとして役立ちます。環境情報の三次元計測は、地球の気候変動に関連する海洋の情報を得るためには必須の計測です。また、作業型AUV (図1)やホバリング型AUVと呼ばれる、比較的小柄で静止する事ができるAUVでは、海底の写真撮影やレーザーを利用した三次元画像の取得も可能です。

図1: 巡航型AUV(左)と作業型AUV(右)の例
次世代海洋資源調査技術
SIPの一課題であるこのプロジェクトでは、 3つの研究の柱<鉱床の実態と成因の解明、民間と協力して行う技術開発、環境影響の評価と生物多様性の保護を行う技術の開発>があります。2000年代に入ってから、AUVが実用機として使われ始め、国内でも海洋研究開発機構の「うらしま」や、東京大学生産技術研究所の「アクアエクスプローラ」、「ツナサンド」が、海底資源の発見に寄与してきており、AUVは海底鉱物資源調査に欠かせないツールとの認識が確立しました。AUVの利点は海底面近傍まで接近できる事にあり、非常に高精細なイメージ画像が得られます。しかし、海底に近づいて観測するという事は、それだけ視野が狭まり、船による調査に比べると、圧倒的にカバーできるエリアが狭くなってしまう事が欠点になります(図2)。
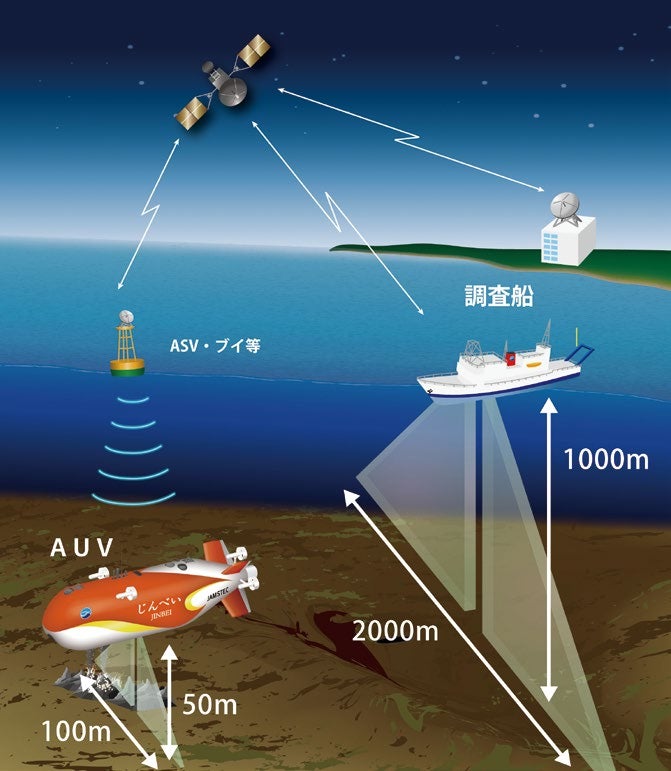
図2: 調査船とAUVの調査面積の違い
そこで、「民間と協力して行う技術開発」の中の一テーマとして、AUVの複数機同時運用化をあげ、これを実現するために、複数の研究機関と多くの民間企業が開発・実用化に取組んでいます。図3が複数機運用のイメージ図です。左側は既存の高機能なAUVを複数機運用化する目的のシステムで、複数機運用に必要な洋上中継器(ASV)と、音響多重通信装置の開発を主軸としています。このシステムは海洋研究開発機構が中心となって開発しています。右側は新たに複数の小型AUVと1機のASVをワンパッケージとして開発するもので、こちらは海洋技術安全研究所が中心となっています。
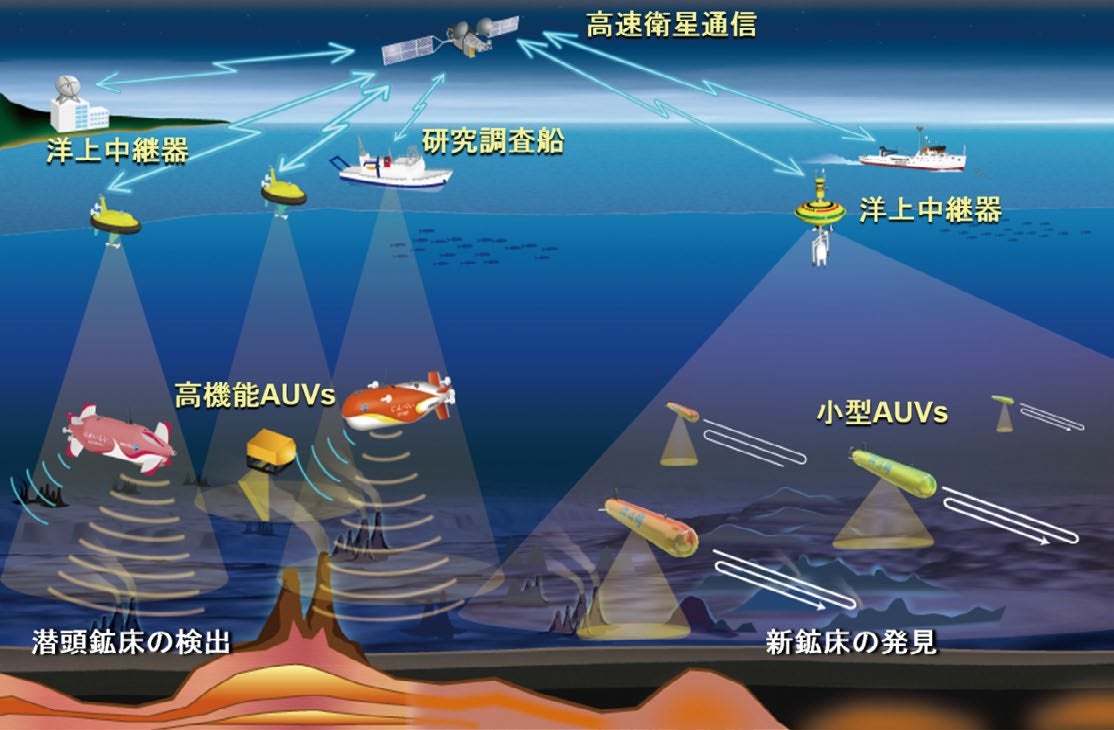
図3:複数機運用のイメージ図(出典:SIP)
しかし、技術的に難しい点があります。安定した海中通信の確保です。ASVを小型にすると波による動揺が激しくなります。動揺は音響通信の品質を著しく低下させ、通信不能を起こします。このためASVの動揺が音響通信に影響を与えないように技術開発を行わなければなりません。また、現在の海中音響通信はトランシーバのようなもので、誰かと誰かが話をしていたら、他の人はそのラインを使用して話す事はできません。複数のAUVがいる場合は携帯電話のような仕組みが必要になります。この問題を解決するのが音響通信の多重化です。海中音響通信では、通信のための占有帯域幅を電波のように広くとる事ができないため、1対向の通信機が主流でしたが、変調方式とプロトコルについて検討し、 1対3までの通信を可能にする予定です。これらのシステムは平成30年度までには、実運用可能な状態に持って行く計画です。
AUVの現状と展開
ここからは、事実だけでなく私的意見も多く入ってきます。従来の単独運用のAUVについては、欧米メーカによる市販化が進んでいます。一方、アドバンスドなAUV研究開発の国際的展開については、大きく二つの方向性があるように思えます。一つはAUVの複数機運用であり、もう一つは長距離巡航型AUVです。
AUVの複数機運用の初期段階のシステム技術については既に前節で述べました。最終の技術目標は協調行動・協調作業の実現になろうかと思います。協調行動を行うためには、協調する相手の行動を予測して、自分の行動を決定せねばなりません。非常に多くのコントロール手法が提案されていますが、現段階では実用になっているものはないと思います。その一番の理由は、海中で離れた相手をセンシングする、または相互に通信する手法が難しいからと思われます。また、海底から鉱物サンプルを、2機のAUVが一緒に持ち上げる場合などは、力学的な相互作用が発生するために、相手の動きを含めた非常に多自由度な運動制御が必要になります。
複数機運用では、AUVの数が増加するほど作業効率が向上しますが、1隻の調査船の搭載容量に限りがある事から、必然的にAUVは小型化します。すると、エネルギー源も小さくなり航行時間が短くなります。充電のために深海からAUVを一旦船上に戻して再充電し、再び投入するためには、少なくとも数時間のロスが発生します。複数機運用すれば船上は一日中AUVの着水揚収と充電をしなければいけなくなります。これを解決する技術が海中充電技術です。海中のAUVに対して、調査船から充電のための装置を展開し、AUVとドッキングさせて充電するという方法です。
海中充電のために、巡航型AUVが自ら制御して充電ステーションにドッキングする事は、速度を下げないといけないため、舵が効きづらくなって、難しいのです(注:作業型はスラスタ制御のため可能です)。そこで、筆者らは、ドッキングステーションにROV(遠隔操作型無人探査機)を用いる事を考え、これにドッキング機能を設けたシステムを試作しました。充電は行っていませんが、このシステムで海中を漂っているAUVとドッキングする試験に成功しています。海中充電には陸上のEVなどで採用されている、非接触式の充電方式であると都合が良いため、海中非接触充電技術についても開発・試験中です。
長距離巡航型AUVは、概ね航行時間が連続して1週間から年程度のAUVを言いますが、これも大きく2種類に分かれます。一つはグライディング型AUVです。グライディング型AUVは補助的に推進器が付いており、大きな翼で海中を滑空する事で推進力を得ます。一方でパワーにモノを言わせて航走するタイプのAUVもあります。推進力をスラスタで得る事によって初めて自在な動きができるわけですから理想の長距離AUVですが、動力源の容量はもとより、長期間無事故で活動するためには、慣性センサの誤差蓄積の対応や、システムの信頼性技術の高度化などが必要になります。海中の動力源は長時間化により電池から発電機へと必然的に代わります。とはいえ、海中ではガソリンエンジンなどは用いる事ができません。海中発電装置としては燃料電池が有力です。現在、米国、仏国、日本などが海中燃料電池開発を手がけています。長距離巡航型AUVのプロトタイプとして世界的に有名なAUVは、海洋研究開発機構が1998年から2005年にかけて開発・試験した燃料電池AUV「うらしま」(長さ10m、重さ10t)です。現在の「うらしま」は、電源をリチウムイオン電池に換装し、大型ペイロードを有する実用AUVとして深海調査に用いられています。
将来はどうなるか?
小型高機能のAUVは、石油・天然ガスの分野とセキュリティの分野で急成長すると思われます。複数のAUV運用技術も向上していくでしょう。それに伴いASVの高度化も進むと思われます。しかし、複数AUVの協調行動・作業のための基礎技術は別途研究開発が必要です。主要基礎技術は相手の探知・認識・類別に関する技術と、多数のAUV間の安定した即時性の高い通信と精密な測位技術になると思われます。また、ASV によるAUVの無人着水揚収や充電に関しても実践的な技術の開発が必要になります。
一方、長距離巡航型AUVのうち、スラスタ推進に重きを置くタイプに関しては、主としてセキュリティ分野での要求が高まるのではないでしょうか。実現のためには、まずは小型で高効率の動力源が必須です。現在は燃料電池が最有力候補ですが、核融合など他の動力源の出現も期待したいところです。動力源が解決できた後には、ポジショニング、長距離監視・遠隔操作のための通信技術、そして高信頼性技術などの研究開発が必要となってきます。筆者は、ニュートリノを使った通信とポジショニングの方法を妄想しています。
実はこの二つのAUV技術が解決できると、サンダーバードのようなシステムが構築できる事になります。つまり、長距離巡航型AUVは、深海の空母のような役割を果たし、小型AUVがここから発着し、ASVが海中と陸とをつなぐ中継無人機の役割を果たします。この形が深海の無人探査機の一つの最終形ではないかと思います。このロードマップを図4に示しました。 AUVは先に述べたように、研究開発段階は終了して、マーケット品であると言われています。しかし、現在市場性のあるものはその一部だけです。我々が深海の調査・利用を諦めない限り、今後もAUVの研究開発は必要であり、AUVによって広い深海をくまなく知る事ができる時が来るのではないでしょうか。
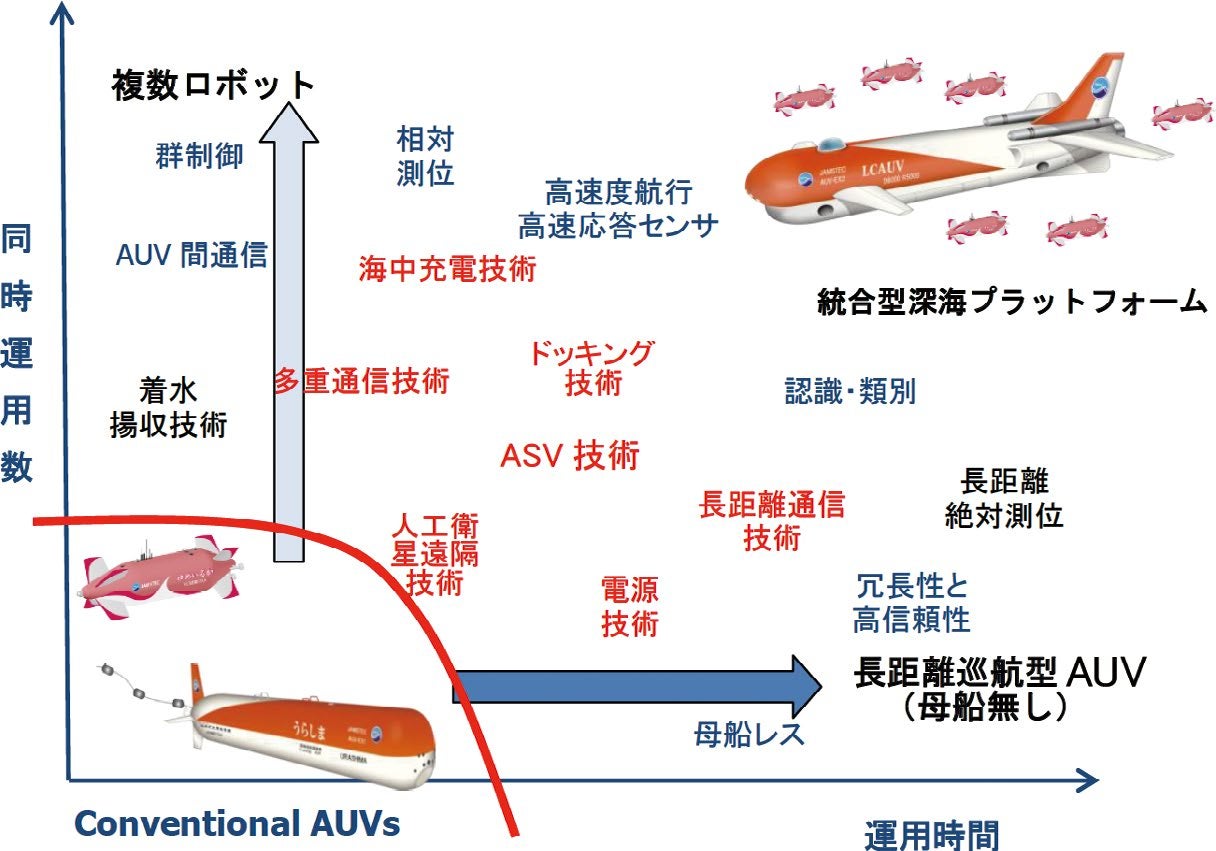
図4:AUV進化のロードマップ(赤字は既に着手している要素技術テーマ)
筆者紹介

国立研究開発法人 海洋研究開発機構 海洋工学センター 海洋技術開発部 部長
吉田 弘
専門は電磁物理学。入所以来、無人探査機の研究に携わり、これまでに6機の無人探査機を作りだした。現在は資源探査のための自律型無人探査機の開発プロジェクトを担当する日本の無人探査機開発の第一人者。