数千キロメートルを無人で自律潜航する水中ロボットSeaglider™
長期間・長距離にわたるグローバルな無人海洋観測を実現!
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

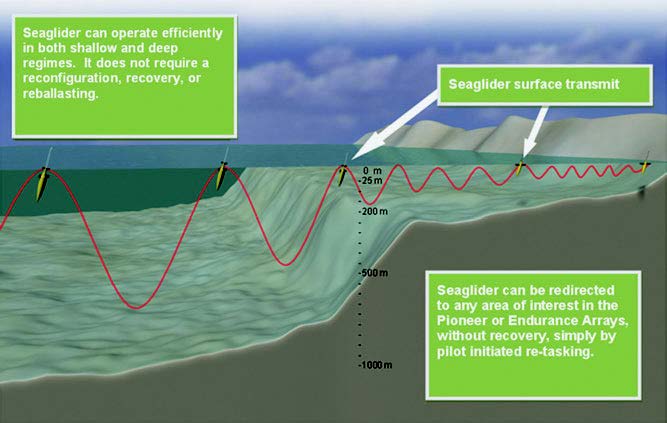
Seaglider™は、推進装置を持たないグライダー型の自律航行水中ロボットです。本体内部に各種環境センサを取り付け、海面と1,000m水深までを上下に航行し、連続的にデータを計測します。計測データは、浮上時に衛星回線を使用してSeaglider™の位置情報と共に基地局に送信されます。
Seaglider™には、温度、水深、塩分濃度、溶存酸素、蛍光光度、流速、濁度、有識溶存有機物等のセンサを搭載でき、駆動部を持たないため、内蔵リチウム電池だけで、最大約10ヶ月間、5,000kmに及ぶ海洋無人観測が可能です。また、新たに高感度シンチレータ検出器がセンサラインナップに追加され、無人の水中放射線計測も可能となりました。
iRobot社について
Seaglider™(シーグライダー)は、ロボット専門メーカー「米国iRobot社(アイロボット社)」が提供する水中ロボットです。iRobot社は、マサチューセッツ工科大学で人工知能の研究を行っていた3名の研究者によって1990年に設立されました。現在ではロボット掃除機「Roomba(ルンバ)」で有名ですが、「ルンバ」に代表される家庭用ロボット部門の他に、福島原発事故で最初に構内の撮影と放射線計測を行った爆弾処理ロボット「PacBot(パックボット)」を製造している陸上ロボット部門、そしてここにご紹介するSeaglider™を製造している水中ロボット部門に分かれています。
東陽テクニカは、水中ロボットを製造しているiRobot社のMaritime Systems事業部と水中ロボット製品にかかわる代理店契約を結び、2010年8月より日本での販売を開始しております。
自律型無人潜水機と水中グライダー
水中ロボットの代表的なものにはAUV (Autonomous Underwater Vehicle)またはUUV(Unmanned Underwater Vehicle)と呼ばれる自律型無人潜水機があります。これらは1970年代から欧米を中心に軍事や海底油田開発を目的として開発が行われてきました。やがてその技術は深海資源探査や海洋環境モニタリングにも利用されるようになり、近年加速的な発展を遂げ、それまでの特注品から商業製品化されるようになりました。
AUVやUUVは、水中カメラや各種センサを搭載し、推進装置としてスクリューを備え、予めプログラムされたコースを有人潜水艦のように泳ぎまわって撮影や計測作業を行います。しかし動力源としてモーターを使用しているため、航続時間は商業化された製品では長くても10時間程度で、長時間、長距離の探査には向いていません。
一方、Seaglider™に代表される水中グライダーは、内部の潜航・浮上、旋回機構により、まさにグライダーのように水中を上下に滑空して航行し、動力源としてモーターを持たないため、数ヶ月間という長期間にわたる観測が可能となります。
「Seagliderのオペレーション」
Seaglider™の開発は1990年代後半から、米国国立科学財団(National Science Foundation)及び海軍研究所(Office of Naval Research)の基金によりワシントン大学の応用物理研究所(Applied Physics Laboratory)及び海洋学部で開始されました。2008年にiRobot社がワシントン大学とSeaglider™のライセンス製造と技術提供に関する契約を締結し、現在までに米国海軍を中心に200台余りのSeaglider™ が世界中に納入されています。

シンチレーション検出器搭載Seaglider.
アプリケーション
Seaglider™は、元来軍事目的で開発されましたが、各種海洋物理や化学データを無人で長期間連続観測できることから、海洋物理学、海洋化学、海洋生物学、気象予報、地球温暖化などの研究にも急速に拡大しています。
2004年Seaglider™は、台風23号が沖縄に到達する直前に米国海軍研究所により沖縄近海に投入されましたが、台風の最中でも塩分濃度や温度などの計測データを定期的に送信し続け、悪環境下でも運用できることを証明しました。これにより従来観測船では不可能であった荒天時の観測もSeaglider™により可能となりました。また、最近では、事故や災害時の水質・汚染調査にも活用されています。2010年4月にメキシコ湾で起きたBP社Deep Water Horizon海底油田爆発事故は記憶に新しいと思いますが、事故後Seaglider™が投入され、約2ヶ月で水深1,000mまで300回以上の潜航を繰り返し、濁度やCDOM (有色溶存有機物)、クロロフィルなどを計測して、水質汚染をリアルタイムで監視し、汚染被害状況や拡散予測の基礎データとなりました。
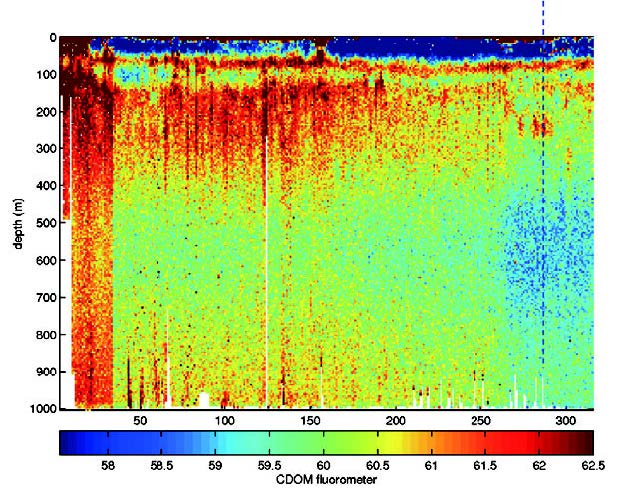
「原油検出データ」
水中放射線計測
iRobot 社では、Princeton Gamma Technology社(プリンストン・ガンマ・テクノロジー社)の協力を得て、150mの水深で使用できる高感度シンチレーション検出器を開発し、水中の無人放射線計測を目的として、2011年8月にSeaglider™へ搭載しました。
Seaglider™に搭載された高感度シンチレーション検出器は、水中においても微小なガンマ線を検出できるよう、ガンマ線の減衰を最小に抑える特殊な圧力容器に実装されており、潜航中はプログラムされた間隔でデータサンプリングを行います。また、大きな流れがなければ、指定された水深や海底に着底した状態で帯留させることも可能です。シンチレーション検出器で検出されたデータは、Seaglider™の潜航/浮上サイクルの間、内蔵メモリーに記録され、浮上した時点で、イリジウム衛星通信を経由してベースステーションに送信されます。データにはインターネット経由でアクセスでき、核種計測や放射線マッピングが可能です。
東京湾での実測

東京湾でのフィールド試験
2011年11月に、シンチレーション検出器搭載の実機を使用して東京湾の入口で実測試験を行いました。計10回の潜航を行い、 2回の潜航で下図(赤丸印)のような放射線が計測され、産業技術総合研究所 評価部 首席評価役(兼務)計測標準研究部門 桧野良穂様の解析で、セシウム137とセシウム134で3つのピークが出るという福島原発事故の特徴を表していることが判明しました。潜航軌道データからこの2回は、ほぼ同じ場所の海底を通過しています。直接人体に支障をきたすレベルではありませんが、既にテレビ等でも報道されているように、福島原発事故の影響が東京湾にも及んでおり、海の中でのホットスポットの存在がSeaglider™でも明らかになりました。
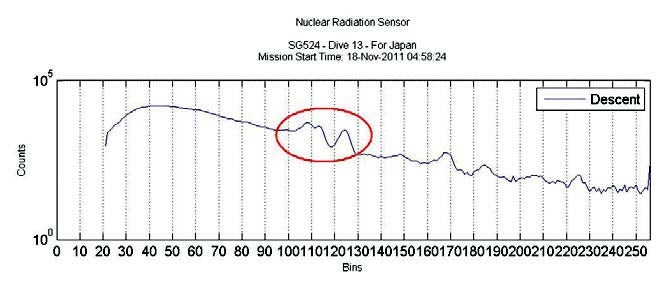
東京湾で計測された放射線
iRobot社のロボット開発の理念は、Dull(退屈)、Dirty(不衛生)、Dangerous(危険)の3Dから人々を解放するというものです。 Seaglider™もまさにその理念に適ったロボットで、今後その活躍がますます期待されます。
筆者紹介

株式会社東陽テクニカ 海洋計測部
半谷 和祐
1982年入社。高エネルギー物理学や自動車、半導体、電源など、異種分野の計測器営業を経て1986年より海洋機器を担当し、現在は海洋計測部を統括。