「DMTS」―シミュレーションと実車を融合した自動運転車両評価
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
- 目次
東陽テクニカ 技術研究所では、電動化や自動運転(AD)、先進運転支援システム(ADAS:Advanced Driver Assistance Systems)など、近年大きな変化がある自動車分野に注目して研究開発を行っております。本稿では、技術研究所が構築した「DMTS」(Driving & Motion Test System)についてご紹介いたします。
AD/ADAS技術開発の課題
AD/ADAS技術を実現するための技術課題は山積みです。これまでは人間が判断して車をコントロール(制御)してきましたが、特に自動運転では、機械がさまざまなシーンで適切な判断をして車を制御する必要があります。例えば、人が運転しているときは目で見て判断していたものを、カメラやレーダーなどの複数のセンサーを使って判断します。より高度になると、センサーの信号をシステムが受け、それによってブレーキやハンドルの操作をするといった高度な処理が必要とされます。多くのデバイスが電子制御され、各デバイスが協調制御することで、システムがさらに複雑になります。
自動車の開発では、設計から最終の走行テストにいたるまでの間に、機能性や安全性を評価する必要があります。システムが複雑化していることで、テストの種類も工数も増えており、効率的な評価を行うことが近年の課題となっています。シミュレーションの精度を高めることも必要ですが、最終的には完成車を使用した実路での評価が不可欠です。
例えば日本では、2021年11月に国産の新型車に対して衝突被害軽減ブレーキ(AEBS:Advanced Emergency Braking System)の装着が義務化されました。この法規に準じたテストを行うだけでも、数十パターンのテストを1車種毎に1週間程度かけて評価します。複数の派生モデルもありますし、開発過程を考慮すればテストにかかる工数は肥大化します。そして、かなり長い期間テストコースを専有しなければなりません。
また、欧州の自主的な自動車安全性能評価プログラムであり、自動車メーカーの新車開発に大きな影響を与えるEuro NCAP(European New Car Assessment Program)が発表した長期計画「Vision 2030」によると、評価シナリオがより現実に近い形で更新される予定であり、自動車開発では年々複雑かつ広範囲のテストが要求されるようになる見込みです。そのため現状でも逼迫しているテスト工数に対してどのように対応するかは今後の大きな課題です。
実際に車を走らせずラボで評価する「DMTS」
これらの課題に対応すべく、東陽テクニカは、実路走行試験を台上化し、実験室(ラボ)内で完成車を使った実路走行相当の試験ができる「DMTS」(Driving & Motion Test System)を構築しました。「DMTS」は、テストコースで行われる実車試験を実験室で行う“Road to Lab”というコンセプトを掲げて開発したトータルソリューションです。

「DMTS」操作イメージ
試験を実験室で行うことにより、天候などの影響(例えば、路面が濡れていると制動距離が長くなってしまう)を受けずに試験の再現性を確保できます。また、開発プロセスの中でも膨大な工数を要する屋外での適合業務の一部や評価を短時間でこなすことができるようになります。このほか、緊急回避試験や、渋滞時の交差点への進入のような、実路で状況を何度も再現するのが難しいシナリオの評価にも対応できます。
「DMTS」の機能
「DMTS」は、車両運動(ドライビング)シミュレーター(車両シミュレーション環境を構築するソフトウェア)などの各種シミュレーター、エミュレーター、あるいは他の試験コンポーネントなどを連携して動作させ、ADAS、自動運転やトルクベクタリング(4つのタイヤの動きを電子制御してコントロールする装置)など、高度化された車両システムを検証するためのエコシステムです。
一般的にシミュレーションは、 開発プロセスの中でMILS(Model In the Loop Simulation:モデルを使った動作確認)から HILS(Hardware In the Loop Simulation:ハードウェアも用いたシミュレーション)までの領域で使われています。「DMTS」はMILS からHILSに加えて VILS (Vehicle In the Loop Simulation:実機も用いたシミュレーション)までをカバーします。
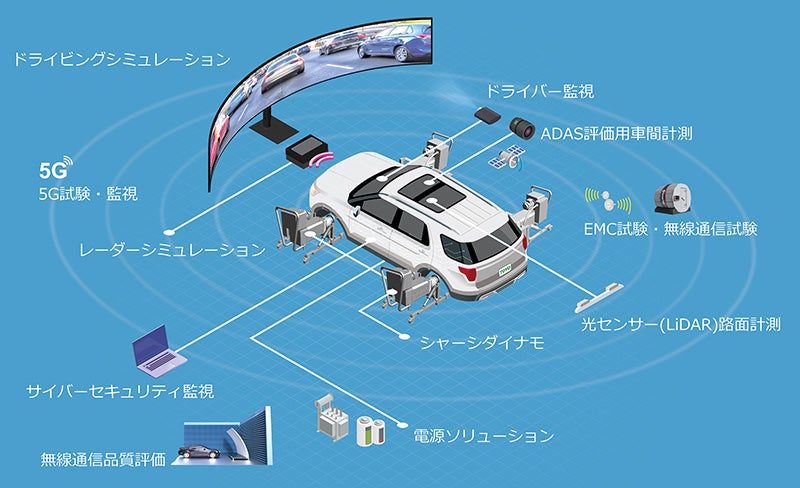
「DMTS」の機能のイメージ
具体的にはステアリング操舵可能なハブダイナモメーターに車両を設置し、シミュレーターが道路、建物、周囲の交通、道路標識、歩行者などの環境を構築し、その仮想空間の中で車両モデルを走行させます。シミュレーター内の車両モデルには仮想のセンサーを搭載し、周りの環境を認識させます。このセンサー信号を実際の物理信号としてハブダイナモメーター上の車両に与えることで実車両の評価を行います。車両が加減速を行うとハブダイナモメーターより速度やトルク、操舵角が計測できますのでこれらの値をシミュレーターに戻します。この後、位置を変えて同様の評価を繰り返します。このようにシミュレーションループの中に実際の車両を組み込むことをVILSと呼んでいます。
「DMTS」メインコントローラが、ハブダイナモメーターや車両運動シミュレーター、レーダーセンサーシミュレーターを統合的に制御し、集約した各シミュレーターのログを記録します。
「DMTS」で重要となる映像
車両運動シミュレーターの景観(シーン)に関しては、自動車メーカーで多くの実績がある「CarSim」(Mechanical Simulation社)や「CarMaker」(PG Automotive社)で用意されたカメラ画像の他に、センサーシミュレーションに特化したソフトウェアと連携することも可能です。ソフトウェアで作られた画像はCG(コンピュータグラフィックス)のため現実感が得られませんし、CGで映像品質を追求すると多大な製作コストが発生します。実際の運転ではさまざまな状況が想定され、多くのシナリオを作製する必要があります。そこで、課題となるシーンを撮影するだけで実シーンを再現する実写映像再生ソフトウェア「True Sim」も活用できます。
撮影は360度カメラを利用しますので、360度円筒スクリーンへ投影することもできます。

360度円筒スクリーンへの投影
現在、前方に向けたカメラが多いですが、今後、車線変更や衝突回避などに対応するために側方や後方に向けた複数のカメラが車両に搭載されることが予測されます。車両に搭載されたカメラの視野角に適合させた領域のみ投影することも可能です。
また車両運動シミュレーターは、交通状況を検証するために交通流シミュレーターとも連携できます。交通流シミュレーターは道路と走行する複数車両を定義することでどのように車両が走行するか、車両同士の関係をシミュレーションすることができます。既定のシナリオだけでなく、ランダムな交通状況を生成することで意図しない動作の検証を行うことができます。
活用を検討できるADAS機能評価の例
実際に「DMTS」でどのようなシステムを連携させ、どんな評価を行うのか。例えば、ADAS関連では以下のような機能を評価できると考えております。
ACC(アダプティブクルーズコントロール) |
アクセル操作とブレーキ操作の両方を自動的に行い、速度を維持し、前方車両に追従して運転を支援 |
|---|---|
TJA(トラフィックジャムアシスト) |
前方車両に追従走行するオートクルーズコントロールと車線維持 |
AEBS(衝突被害軽減ブレーキ) |
センサーやカメラで前方を監視し、車両などに衝突すると判断した場合は自動でブレーキをかけるシステム |
LDW(車線逸脱警報) |
カメラで車線を認識し、車線から逸脱しそうになると、ハンドルの振動や警報を発する |
LKA(車線逸脱防止支援システム) |
カメラで車線を認識し、走行ラインを維持するようにハンドル操作を補助 |
ここでは機能評価の例を2件ご紹介いたします。
<機能評価例①:AEBS(衝突被害軽減ブレーキ)の評価>
自車両が前方を走行する車両や歩行者を検知して、ブレーキが作動するかを評価する試験です。ここでは、ハブダイナモメーターにセットアップされた車両で実際にステアリング操舵やアクセル、ブレーキなどの操作を行います。それらの信号を「CarSim」や「CarMaker」などの車両運動シミュレーターへ送ることで実車両とシミュレーター内の車両を連携させます。

ハブダイナモメーターにセットアップされた車両と車両運動シミュレーターでAEBSを評価している映像。前方の車両を検知して自動でブレーキが作動する。
https://youtu.be/oFrDCVtMxXY
車両運動シミュレーター上のモデル車両には、カメラセンサーやレーダーセンサーを搭載しており、モデル車両と前方の車両や歩行者との距離を「DMTS」のレーダーターゲットシミュレーター(UniqueSec社「ASGARD」)で模擬します。自車両は、模擬されたレーダー信号を処理してブレーキをかけます。
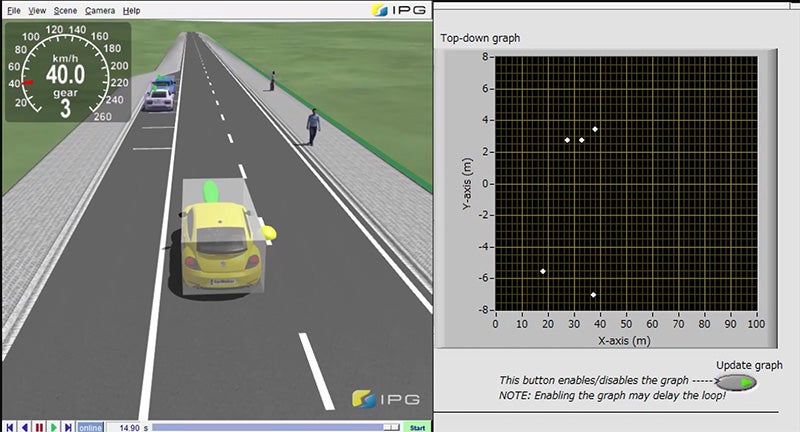
シミュレーター上で設定したシナリオ(左)に従って模擬レーダー信号(右)を車両に送出
ラボで試験を再現していますので、天候や路面・タイヤの状態に左右されずに評価を繰り返すことができます。
また、自車両が交差点を右折し、対向車と衝突するシナリオ(右直事故)を評価する場合、対向車との衝突タイミングが合うようにステアリング操舵を加える必要があります。この場合、人がハンドル操作するよりも確実にタイミングをはかることができる、自動運転ロボット(HI-TEC社「NaviControl」)と連携させて評価を行います。
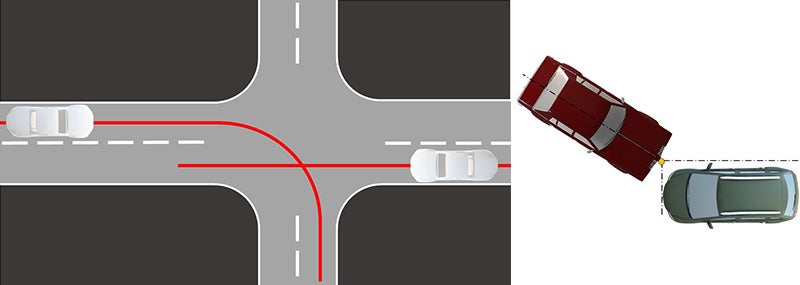
直進で対向する車両に対して自車両が交差点を右折するシナリオ
<機能評価例②:LDW(車線逸脱警報)・LKA(車線逸脱防止支援システム)の評価>
これらの評価に際しては、ステアリングトルク(ハンドルを回す力)の再現も重要です。これらのシステムはカメラで車線を監視し、車両が車線を逸脱しそうになると警報を発すると同時にブレーキを掛けて車線を維持したり、ステアリングを制御したりします。
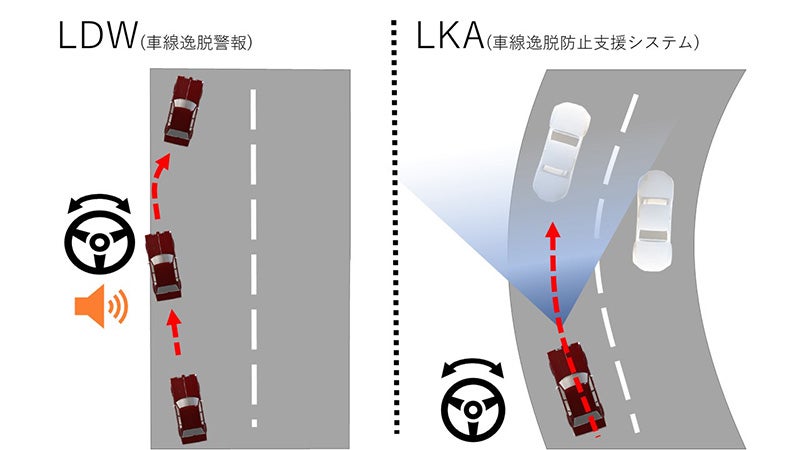
LDWとLKAの評価シナリオのイメージ
ドライバーが車線変更などを意図して操舵した場合には、ドライバーの操作が優先(オーバーライド)されます。ハブダイナモメーターの慣性や抵抗をキャンセルし、セルフアライニングトルク(ハンドルを切ったときに直進状態へ戻ろうと働くトルク)を発生させなければなりません。「DMTS」のハブダイナモメーターに搭載している「ステアリング反力装置」によって、車両の走行状態に合わせた実車両に近いステアリングの操作感を提供できると考えております。

LDWを評価している映像。
車線を逸脱しそうになると、警告灯(黄色)が点滅し、ハンドルが振動する。
https://youtu.be/zE6j__Xovt8
「DMTS」のさらなる活用 ―ADASのその先
ADASは自車両に搭載されたセンサーを活用して事故が発生する“直前”の動作を支援する装置です。自動車がより安全・快適に走行するためには、事前に危険な状況が察知できれば、またはそもそも危険に遭遇しなければ、事故はもっと減らせるかもしれません。
今はまだあまり普及していませんが、V2X(Vehicle to everything)通信が広く使われるようになれば、自車両に搭載されたセンサーに頼るだけではなく、信号のサイクル情報、死角の車両や歩行者の情報、道路の規制情報、他車両との協調などのさまざまな情報を統合的に取得・分析・活用できるようになります。「DMTS」は車両評価だけでなく、V2X車載器をシミュレーション環境で評価する「V2Xエミュレータ」(Spirent Communications社)との連携も可能で、「マルチバンドGNSSシミュレータ」(同)から位置情報を提供して自動運転車両の評価も行っています。
このように「DMTS」を使用することで車両全体の協調制御の機能性・安全性の確認、さらには自動運転車に対しても市街地などのシナリオを含む試験を実験室内で行うことができ、まさに“Road to Lab”を実現できる環境を構築することができるのです。東陽テクニカは、自動車開発に携わる皆様をサポートさせていただくことを通じて、事故がない安全な社会の実現を目指しています。
筆者紹介

株式会社東陽テクニカ 技術研究所 部長
木村 尚史
1998年 東陽テクニカ入社
開発部、技術部を経て技術研究所にて自動車の計測・実験環境開発に従事。



