OROS e-NVHモジュール
特長
- モータ構造(スロット数、極数など)を考慮したトラッキングフィルタを搭載
- インバーターのスイッチング周波数のトラッキングに対応
- 独自解析手法“Spatiogram(スパシオグラム)”によるモータ磁気振動の解析
- 回転に追従するトラッキングフィルタを適用したサウンドデザインが可能
- 豊富な解析機能(NVGate)で、あらゆる振動騒音の原因特定をサポート
e-NVHとは
回転中の電磁加振力はモータ構造と周波数により決まります。
下図は、電磁加振力の1回転中の大きさを表しますが、これをe-Shapeと言います。また、その時の周波数をe-Frequencyと言います。e-Shape、e-Frequencyが構造共振のモードシェープと一致し、励起することで大きな音振動が発生します。

測定例
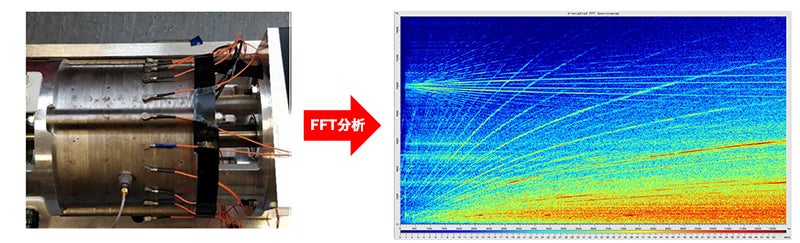
モータのケーシングに加速度センサを配置します。
センサの個数は、観測したいe-shapeのモード次数の2倍必要です。この時、すべての点を同時計測します。
得られた加速度信号を周波数分析し、得られたカラーマップから“スパシオグラム”を算出します。
スパシオグラム
モータの諸元を入力することで、発生しうるe-Shapeとe-Frequencyを算出します。それを実際に測定された現状の周波数分析結果に適用することで、e-Shapeの形状毎に発生している周波数成分を抽出します。
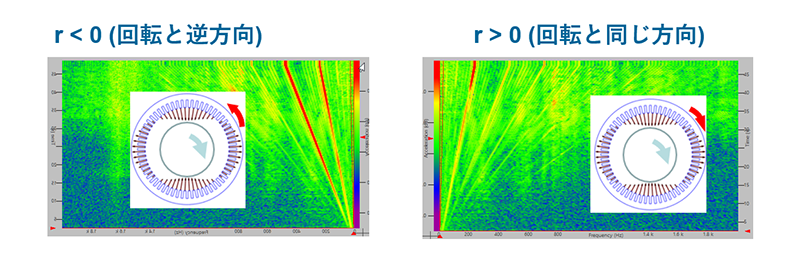
これらをスパシオグラム(Spatiogram)と言います(下図)。本例では、反時計回り時に発生する2次のe-Shapeが大きな音振動を発生させていることがわかります。
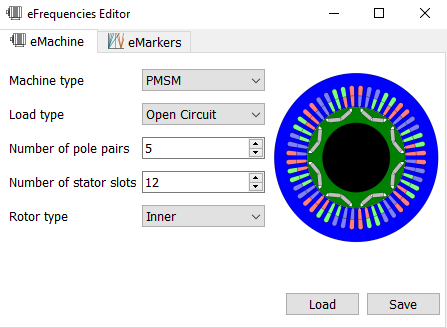
- モータの仕様(PMSM or SCIM)
- 負荷の有無
- 極数
- ステータスロット数
- インナー or アウターロータ
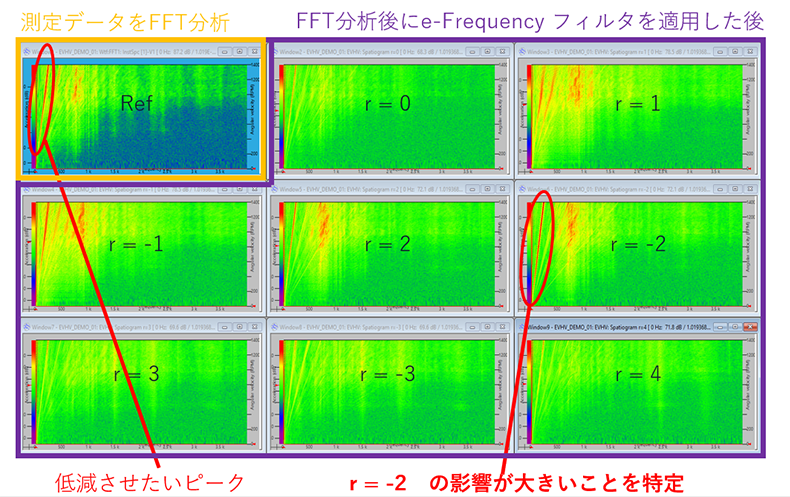
スパシオグラムのプラスとマイナスは、磁気加振力の回転方向により異なります。
ロータの回転方向と同じ方向をプラス、ロータの回転方向と逆の場合はマイナス、となります。