自動運転を支えるセンサ技術“LiDAR”と路面計測

<第1部>:今注目を集める"LiDAR"技術
子供の頃夢中になったSF映画や未来を舞台にしたアクション映画では、空飛ぶ車やドライバーと会話する車、そして運転しなくても自動で目的地まで連れて行ってくれる車、といったものが次々に登場して、そんな未来に強く憧れたものでした。空飛ぶ車はまだまだ先の話かもしれませんが、自動運転は現実になりつつあります。
自動運転を支える技術は多々ありますが、ここではセンシング技術について触れたいと思います。従来の車両の運転は、ドライバーが目や耳などを使って認知し、そして脳が判断して行動を取ることで成り立っています。しかし自動運転車両では、認知はセンサが行い、判断は車載コンピュータが行います。車両には多数のセンサが搭載され、周囲の人や車、障害物などを認識しますが、センサが正しく検知しなければ、車載コンピュータも正しい判断ができず、事故につながってしまいます。そのため、センシング技術は自動運転において非常に重要な役割を担うのです。
このセンシング技術として近年注目されているのがLiDAR(ライダー:Light Detection and Ranging)です。“光による検知と測距”という意味で、レーザーの照射と反射から物体を検知しその物体までの距離を把握するセンサです。
今LiDARが注目を集めているのはなぜでしょうか?物体の距離を検出する目的で車両に搭載されるセンサは他にもありますが、それらは以下のようなデメリットがあります。
- ミリ波レーダー
- 金属に対しては効率よく反射するが、人など非金属に対しては反射が弱く検知しづらい。
- カメラ
- 夜など暗い状況や霧などの天候では検知しづらい
それに対し、LiDARは非金属体からも効率的な反射を得られるうえ夜間でも利用可能、と従来のセンシング技術と比べてアドバンテージがあるため注目されているのです。
しかし、LiDARにも弱点はあり、決して万能ではありません。また、ミリ波レーダーも技術の進歩により改善されており、弱点を克服することができるようになってきています。カメラについても、デメリットはあるものの画像処理による物体認識の技術が高く、その点においては他のどのセンシングデバイスよりも優れていると言えます。
実際にはどれか1種類のセンサだけを搭載することはなく、目的ごとに異なるセンサを搭載したり、冗長化の目的で複数種類のセンサを搭載したりすることが考えられます。そのためレーダー、LiDAR、カメラの三位一体でさらなる自動化を進め、その安全を確保することが可能になるでしょう。LiDARが注目されるのは、その技術はもちろんのこと、LiDARの登場により三位一体の自動運転システムを構築することができるようになるからだと私は考えます。
さて、LiDARが物体までの距離を測るとき、TOF(Time Of Flight)と呼ばれる反射光を受信するまでの時間を利用するのが一般的ですが、ここでは、三角法を用いたユニークな方法で測距を行う路面スキャン用LiDARを紹介したいと思います。ベルギーXenomatiX(ゼノマティックス)社の「XenoTrack-RT」(ゼノトラック-RT)というシステムで、写真1、2に示すように、センサ部を車両のルーフに搭載し路面をスキャンするものです。

写真1:「XenoTrack-RT」を車両に取り付けたところ

写真2:路面形状計測システム「XenoTrack-RT
レーザーソースは、可動部を持たないソリッドステート型マルチビーム方式を採用しており、3,000本のレーザーを60Hz、つまり毎秒180,000本のレーザーを照射します。そして、LiDARによる測距としては桁違いに高い、精度2mm以下を実現しています。この高精度は、明暗(昼夜)、天候(雨、霧、雪など)に左右されることもありません。
<第2部>:XenoTrack-RTを用いたアプリケーション
本システムを用いた主なアプリケーションとしては以下の3つがあります。
1. 自動運転車両の開発
自動運転車両はセンサが周囲の状態をセンシングしながら走行することはすでに述べましたが、車両が安全に走行するためには道路の状態も検出しなければなりません。
例えば、道路上の落下物や穴(ポットホール)を検知し、安全に走行するために回避や停止を行ったり、あるいは小さな対象物についてはタイヤで踏まないよう走行したりすることも必要です。そのための路面センシングとして、本システムを利用することができます。

写真5:道路上のスピードブレーカー
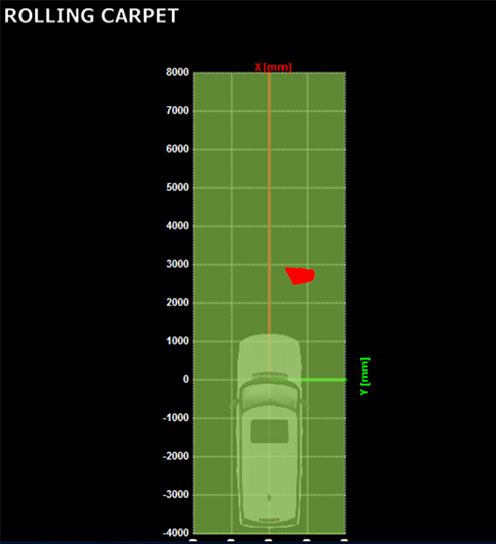
写真6:システムの検知例(高さ方向を色で表現)
2.アクティブサスペンションの開発
旧来のアクティブサスペンションは入力信号に対して応答しますが、これでは路面からの振動や衝撃を完全に消すことはできません。
これに対し、現在研究・開発が進められているアクティブサスペンションは、車両前方の路面状態を認識して制御するタイプです。車両が路面からの入力を受ける前に路面状態を把握する目的で、本システムを用いることができます。

写真1:「XenoTrack-RT」を車両に取り付けたところ
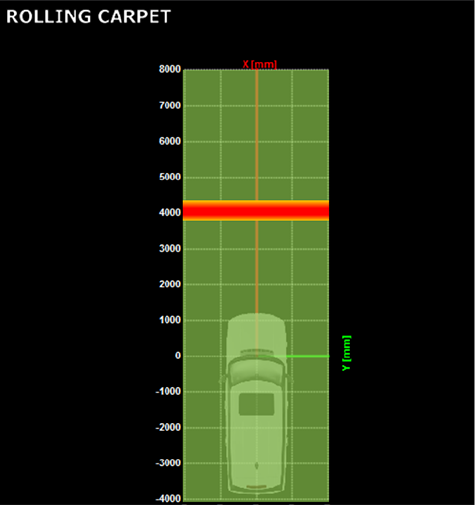
写真2:路面形状計測システム「XenoTrack-RT」
3.路面プロファイルを使ったシミュレーション試験
例えば車両メーカや部品メーカが行う耐久試験の中には、路面からの入力とシャシや部品の応力を測定し疲労被害度を算出する試験があります。当然、路面が違えば結果は変わってくるため、さまざまな路面での試験が要求されます。機構部品や車両の仕様が変更になると、同じ路面で再度同じ試験を実施することになりますが、実車を用いて実路を何度も走行するのは非効率です。そこで、図1のような路面プロファイルを取得しシミュレーションツールにインポートすれば、何度でも車両走行を模擬し、疲労被害度を算出することができます。
このようなデータは操縦安定性試験や乗り心地試験にも利用することができます。
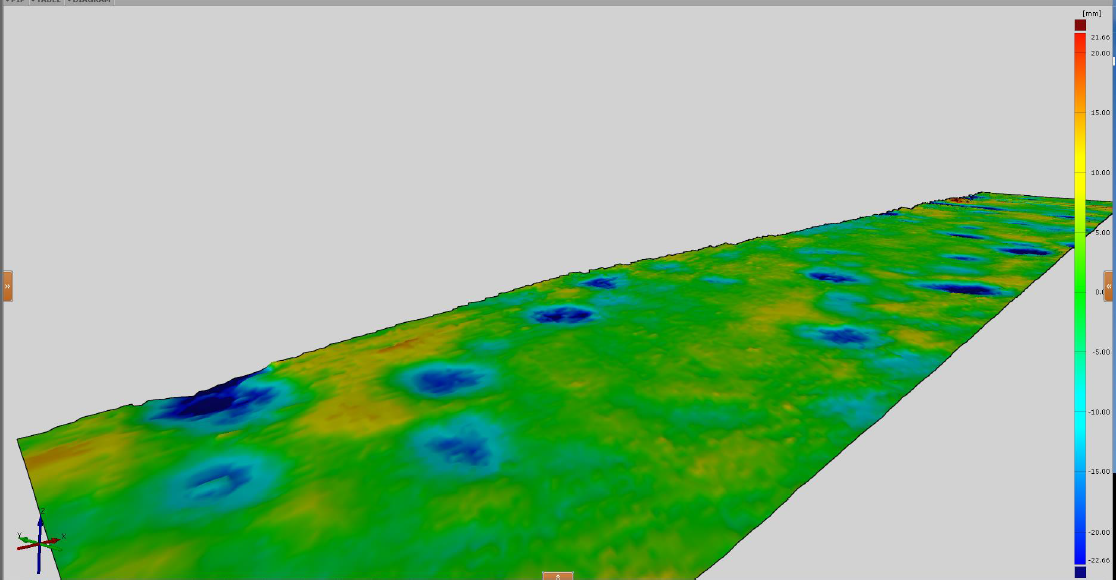
図1:「XenoTrack-RT」で取得した路面プロファイルデータ
当社は最先端の計測機器を研究開発者らに提供しており、自動運転技術開発のサポートをする製品は他にも取り扱っていますが、「XenoTrack-RT」をラインアップに加えたことで、自動運転技術開発や安全・快適な車両開発により一層貢献できると考えています。
このようなデータは操縦安定性試験や乗り心地試験にも利用することができます。
プロフィール
PROFILE

草村 航
株式会社東陽テクニカ
機械制御計測部
2002年 東陽テクニカに入社。
主にデータロガーなどを用いたデータ収録アプリケーションを担当。


関連トピックス
キーワード




試験計測のお困りごとがございましたらなんでもお気軽にご相談ください。
試験計測のお困りごとがございましたら
なんでもお気軽にご相談ください。