これからの自動車計測はどこへ行く[3/3]

車の運動を測る
一般道路での車両に「閉じた」計測とは、計測対象の車両に計測機材を積み込んで、走りながらエンジン回転数やアクセル開度などを測ることを意味します。もちろん、それだけでは目新しい話題ではないでしょう。
ここでは、「これからの自動車計測はどこへ行く[2/3]」で紹介した人と車両の同期計測に準じて、車の運動計測の方法をお話ししたいと思います。つまり、車がどのような走行をしたか、その運動(位置、速度、加速度など)を計測する方法です。車には速度計がありますし、ステアリングの角度も測れるのですが、それと実際の走行軌跡や速度は必ずしも一致しません。雪道や坂道であればスリップして車内計測の値と実際の物理的な運動は違ったものになるでしょう。このように、さまざまな環境における車内計測と物理的な運動の両方を計測したくなることがあります。そんなとき、近年著しく性能が向上したMEMSのセンサを利用することができます。MEMSとは、マイクロ・エレクトロ・メカニカル・システム(微小機械電機システム)の略称です。半導体の集積回路を製造する技術を上手に使うと、トランジスタに代表されるような半導体を高密度に集積するだけでなく、微小な構造を半導体ウェハの上に作り出すことができます。それで加速度などを感知できるわけです。
MEMSセンサとは?
ここで加速度の測り方を確認しましょう。先端に重りのついた金属の棒を車に取り付けて発進すると、棒はわずかですが発進方向と反対側にしなるはずです。これは棒が発進の並進加速度を受けてしなったわけです。金属の棒をそれぞれ直角に3方向に向けてやれば、車の3次元的な加速度運動を完全に測ることができます。そして、金属棒をマイクロメートルの大きさに微小化したものがMEMSの加速度センサです。さらに、センサを田の字やH形に複数置いてそれぞれの相対加速度を測ると、センサが回転した時だけ特定のしなりが生じ(Hの右は前方にしなり、左は後方にしなるなど)回転の速度を検出することができます。こうして、並進加速度と回転速度を正確に測れるように複数のセンサを1ユニットに納めたものをIMU(慣性計測装置)と呼びます。このIMUに通信ユニットや制御マイコン、バッテリなどを接続して箱に納めたものをIMU計測器と呼びます。
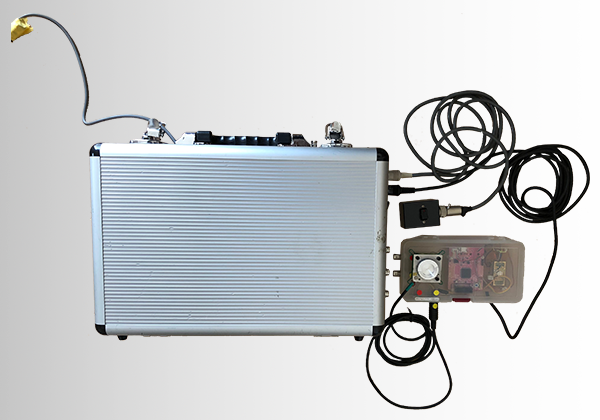
図1:IMUによる慣性計測は、センサーの入ったジュラルミンケースを車両の床に置くだけ。実に簡単である。
IMUを使えば、自動車の走る、曲がる、止まるという運動を計測できます。測るだけなら、市販のMEMSでできたIMUをインターネットで買ってマイクロコンピュータにつなぎ、少しの命令を送って計測結果を記録すれば済みます。昨今のIoT工作が好きな学生さんなどは、3日もあればMEMS製のIMUシステムを手作りすることができるでしょう。ただし、きちんと計測できるファームウェアとソフトウェアを準備するとなると別問題です。それなりのソフトウェア技術を持った先生や技術者が必要です。とはいえ、基礎的な原理は付録の通りですからトライすることはできます。
実験結果
停車時のアイドル振動を捉える
今回の実験では、IMU計測器を車に積んで計測を行いました。IMUで計測を行うと、一定周期ごとの加速度と角速度が得られます。
それをグラフにすると図2のようになります。
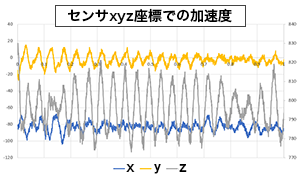
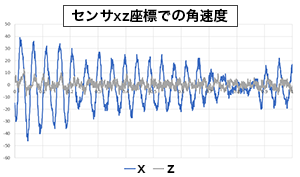
図2:IMU計測器で測定した加速度と角速度のグラフ
図2のグラフはわずか1秒間の計測結果です。こんなガチャガチャした線を見ていても何が起きているのかはよくわからないですね。どの座標のデータも1秒間に21周期の信号が入っているのを見て、あれだなとわかる方もいらっしゃるかもしれません。60秒で1,260周期、4気筒のガソリンエンジンのシャフトが停車中に回転している630rpmのアイドル振動を捉えているのです。
まず、車両内で測った加速度を見ても、外から見た車両の運動を理解するのは大変難しいです。そのため、この加速度と角速度を外で立ち止まっているヒトの見る座標系に変換します。これは廉価版のカーナビが表示する地図の座標と同じように、地図上を車両が走るように車両の軌跡や速度を示すわけです。また、カーナビの地図と同様に、軌跡は真上から見たいものです。真上とは、地球重力の方向と考えましょう。そして、地球重力の方向は上記のアイドル時の加速度データをうまく計算処理すると得られます。
それをもとにして、IMUの加速度+角速度データ(センサ座標系データ)を地球重力と重力に直交する平面の座標系(ICE座標系と呼びます)に変換します。
走行時の加速度を求める
得られたICE座標系での加速度グラフは、左記のようになります。ここでは停車から発進、周回路を1周ドライブしてほぼ元の位置で停車したところまでをグラフにしています。時間的には2分弱のドライブです。
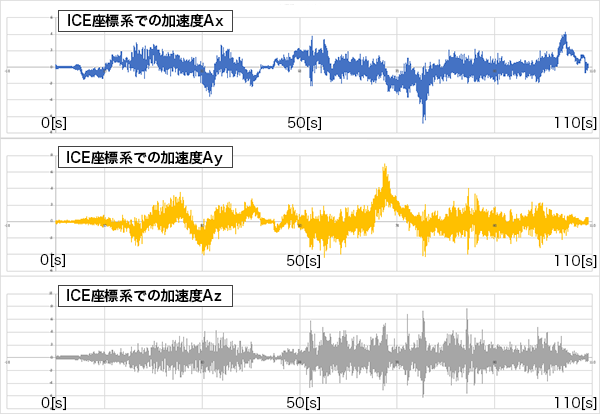
図3:ICE座標系での加速度
多分、これを見てもまだなんだかわからないでしょう。ヒトの感覚として加速度を実感できるのは、電車が急ブレーキをかけたときや階段から過って転落したときくらいです。そこで、このグラフを積分して速度を求めてみましょう。
速度を求める
速度は、xyzバラバラの速度ではなく、速度ベクトルの長さをグラフにします。
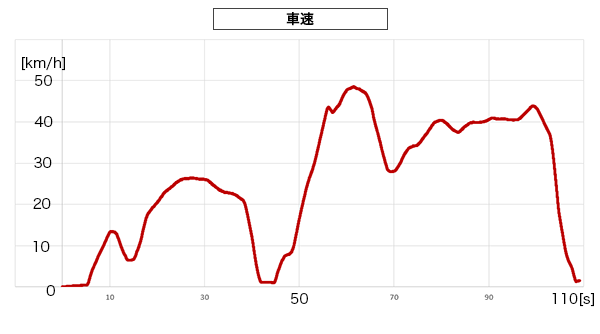
図4:速度ベクトルの長さ
どうでしょう?普通の速度の記録のようですよね。まさに、同じになっているのです。これを見ると、最初は停止していますから速度0km/hです。5秒後に発進して走り出し、40秒後には一時停車しています。また走り出して一時は50km/hまで上がり、一定速度で走ってから最後に停車しています。
位置座標を求める
この走行を真上から見た(ICE座標でX-Y平面)位置座標グラフは、速度ベクトルを再度積分すると求められます。
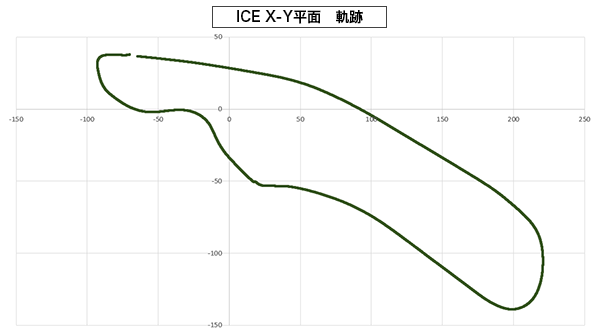
図5:走行を真上から見た位置座標グラフ
左上の線がわずかに途切れているところが、最初の停車中の位置です。発進すると左へ進み、下へ下がります(方位としては西から南へ向かっている。その後、蛇行してから直進、左回りの道路を通って出発点へ戻っています。
ドライブコース
そして、これが図6に示すドライブコースだったのです。このコースで、IMUによる精密な運動データを取ることができたというわけです。
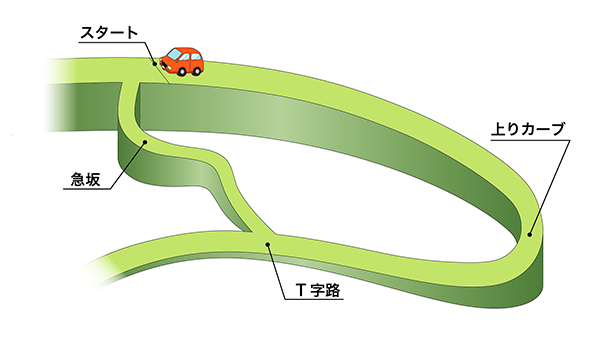
図6:ドライブコース(イメージ)
先ほどの車速と標高差を併記したグラフを最後に示します。どんなドライブだったのかをグラフを見ながら想像してみてください。10秒間で23m降下する下り坂カーブのちょっと楽しいドライブです。
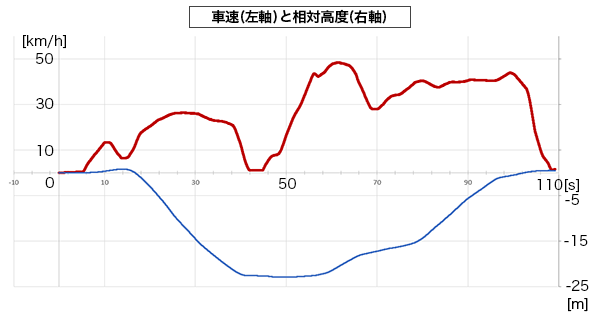
図7:車速と標高差のグラフ
【付録 計測の原理】
プロフィール
PROFILE

二上 貴夫
株式会社東陽テクニカ
モビリティラボラトリー


関連トピックス



キーワード




試験計測のお困りごとがございましたらなんでもお気軽にご相談ください。
試験計測のお困りごとがございましたら
なんでもお気軽にご相談ください。