ADAS 評価用車間計測システム
自動運転・ADAS評価をターゲットとしたRTK-GPS方式を採用の車間,および車両-人・もの計測システムです。この方式を採用することで位置精度を理論上2cmで行えます。 車両の位置とRTK 補正情報はWi-Fi 内で通信されるため、Wi-Fi以外に無線を用意する必要がありません。
【DualCARシステムとは】
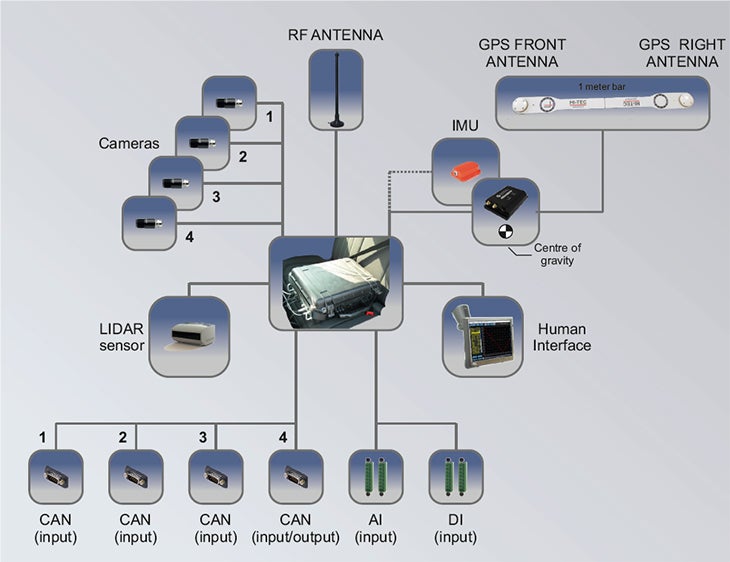
RTK-GPSアンテナ&レシーバ, IMU(慣性計測装置), ソフトウェアが基本構成のトータルソリューションシステムです。車両姿勢(速度、加速度、ヨー角)、アナログ・デジタル入力、ビデオ映像、CAN チャンネルを同期記録し、リアルタイムで表示します。
主なアプリケーションは以下となります。
■自動運転のアルゴリズム支援
■ADAS(先進運転支援システム)アプリケーション
a. ACC(Adaptive Cruise Control): 定速走行・車間距離制御装置
b. LDW(Lane Departure Warning): 車線逸脱警告
c. AEB(Autonomous Emergency Braking): 衝突被害軽減ブレーキ
d. BSD(Blind Spot Detection): 自動車用死角
特長
- 2 cm の位置確度(各車両)
- 0.1°RMSのヨー角度精度
- 0.2 km/h の速度確度
- リアルタイム計測
- 4CAN Bus 入力(オプション)
- 同期されたビデオ
- 1 km オペレーション距離
- 50 Hz までのデータ出力レート
- 使いやすいソフトウェア
DualCARシステムとは
RTK-GPSアンテナ&レシーバ, IMU(慣性計測装置), ソフトウェアが基本構成のトータルソリューションシステムです。車両姿勢(速度、加速度、ヨー角)、アナログ・デジタル入力、ビデオ映像、CAN チャンネルを同期記録し、リアルタイムで表示します。
主なアプリケーションは以下となります。
■自動運転のアルゴリズム支援
■ADAS(先進運転支援システム)アプリケーション
a. ACC(Adaptive Cruise Control): 定速走行・車間距離制御装置
b. LDW(Lane Departure Warning): 車線逸脱警告
c. AEB(Autonomous Emergency Braking): 衝突被害軽減ブレーキ
d. BSD(Blind Spot Detection): 自動車用死角
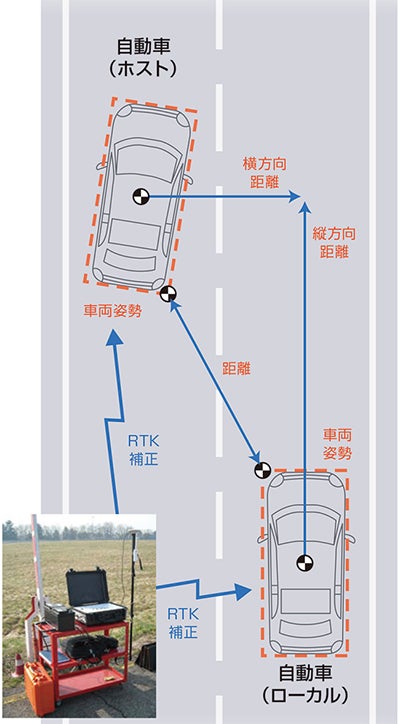
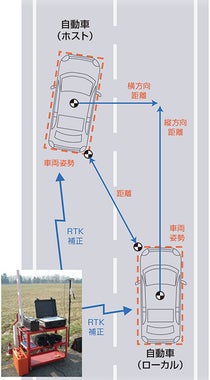
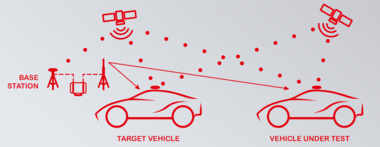
計測概念図

車上の設備

RTK-GPS基地局
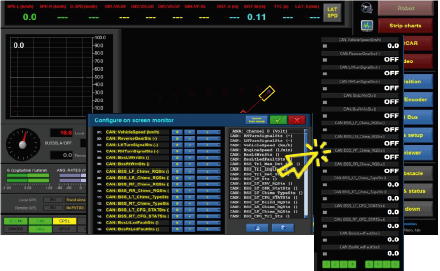
ソフトウェア
DualCARソフトウェアはTFTタッチスクリーンモニターで簡単にセットアップが可能です。設定パラメータ, データチャート, 車両情報, ビデオ映像,等を表示します。各DualCARは8アナログ&8デジタル入力、4 x 256 CAN(最大)チャンネルを装備しています。それぞれのチャンネルのストリップチャートも表示します。 また、必要な計測器の表示や同期等のソフトウェアカスタマイズも可能です。
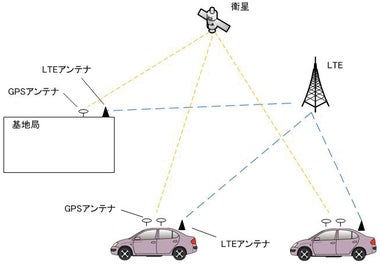
システム構成図
アプリケーション
■自動運転のアルゴリズム支援
■ADAS(先進運転支援システム)アプリケーション
ACC(Adaptive Cruise Control): 定速走行・車間距離制御装置
- 車間距離
- 絶対および相対速度
- 進行方向加減速度
- 音、光による警告認識
- 衝突までの時間
- 目標や試験車両ヨーレート
LDW(Lane Departure Warning): 車線逸脱警告
- ラインまでの距離計測
- オープンロードテスト用のバーチャルラインリファレンス
- 横加速度
- 音、光による警告認識
- 録画したビデオ画像との重ね合わせ
AEB(Autonomous Emergency Braking): 衝突被害軽減ブレーキ
- 車間距離
- 絶対および相対速度
- 進行方向加減速度
- 音、光による警告認識
- 衝突までの時間
- 目標や試験車両ヨーレート
BSD(Blind Spot Detection): 自動車用死角検知
- 車間距離
- 絶対および相対速度
- 進行方向の加減速度
- BSD警告信号出力
- 衝突までの時間
- 目標や試験車両のヨーレート

DualCARの可能性
DualCAR は完全無人運転も可能です。
ドライバによる運転以外にも、HITEC社Navicontrolシステムを使用した完全無人運転も可能です。ステアリング・アクセル・ブレーキロボットを対象車両に装着し、安全かつ高再現性を実現できます。

無人運転用ステアリングロボット

無人運転用ペダルロボット
DualCAR は完全無人運転も可能です。
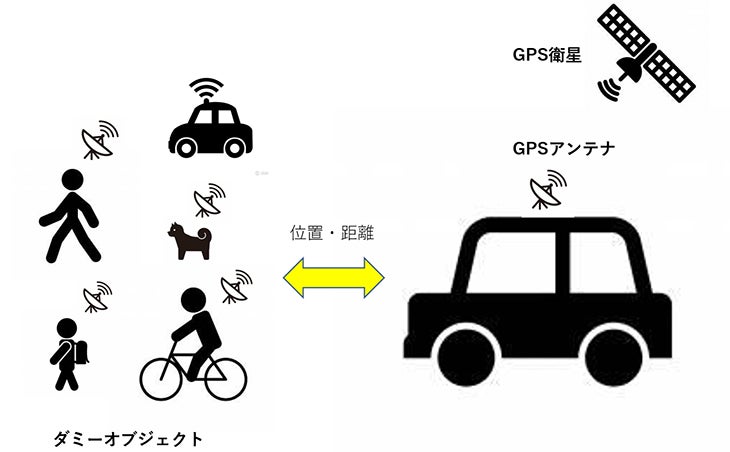
歩行者や自転車などの飛び出しを模擬するために使用するもので、GPSで位置制御したり、リモコン制御したりすることが可能です。
オンリーワンソリューションのご提案
幅広いラインナップを持っている東陽テクニカでは以下のような複数の計測器を組み合わせることによりシステムアップが行えます。
- Dual CAR(この製品):複数車両の位置計測
複数車両の絶対速度、相対速度、衝突までの時間などの計測も含む - ダミーオブジェクト:歩行者や自転車などの模擬 バルーンダミー車両等も含む
- imc社データロガー:車両や人の計測&ドライバ刺激
- Smart Eye視線計測:人(視線や頭部運動)の計測


- その他 車載Ethernetなどの計測
使いやすいソフトウェア
ストリップチャート表示
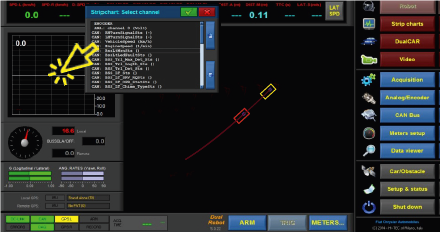
256chのアナログおよびデジタル CAN入力のデータの各パラメータはストリップチャートとで表示されます。また、必要な計測器の表示や同期等のソフトウェアカスタマイズも可能です。
- VUT(ローカル)速度
- 目標(リモート)速度
- 相対速度
- 相対距離
- 最小車間距離
- GPSアンテナ間の最小距離
- 衝突までの時間
- 横速度(直線で計算)
DualCAR表示モード
同時に複数のデータのストリップチャートを表示することができます
ビデオ表示モード
最大4台のカメラで表示できます。 ユーザーはクリックするだけでカメラを切り替えられ、記録されたビデオを重ねて比較することができます。 Video-CANモジュールはビデオストリームのCANバス情報のマージを可能にします。
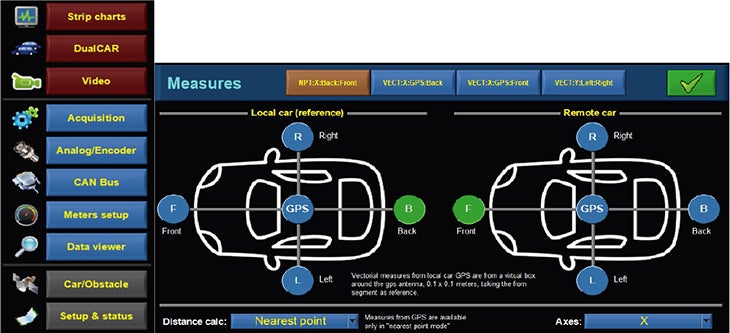
車両形状
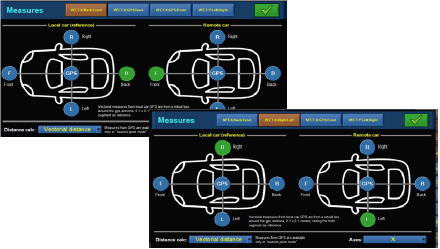
車両形状寸法は手動入力またはGPSアンテナを使用しマッピングします。 車上のGPSアンテナを基準として±2cm の精度で各ポイントでの計測が可能です。
車両間隔
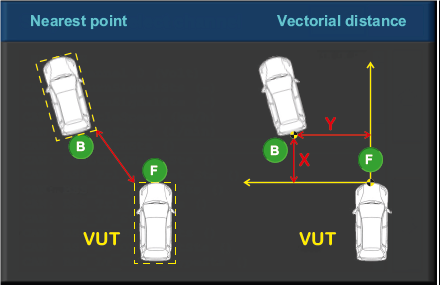
車両間隔は2通りの方法で計算されます。
- 最短距離
- ベクトル距離
ベクトル距離の場合は設定された位置からの直交座標になります
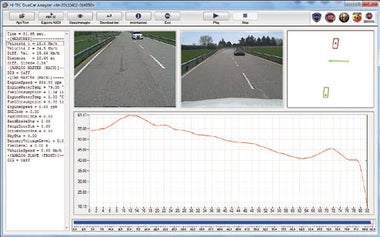
DualCARアナライザ
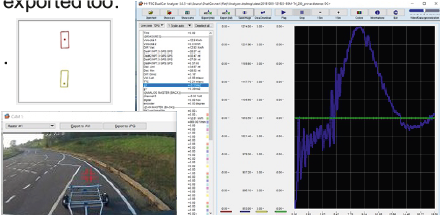
データ分析用の後処理ソフトウェアです。 取得したすべてのチャンネル(CAN、アナログ、デジタル) 計算されたパラメータ(距離、速度)およびGPS / IMUデータ (座標、加速度、角速度)を処理することができます。