XenoTrack-RT(路面形状計測システム)




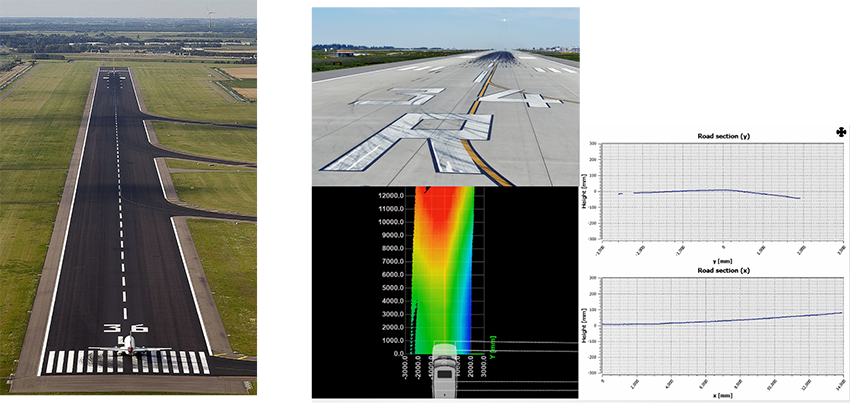
XenoTrackは、LiDARを用いて路面形状を計測するシステムです。センサを車両のルーフなどに取り付け、路面の凹凸をLiDARを用いて計測します。このLiDARは、True-Solid-state方式を採用しており、多点を同時に計測することが可能で、高速走行時でも計測することができます。
特長
- True-Solid-state型LiDAR方式を採用した可動部を持たないマルチビーム方式(三角測量)
- 2mm以下の超高精度で路面の形状(高さ)を測定
- 秒間180,000点(3000本のビーム×60Hzサンプリング)の高速高分解能測定
- 明暗(昼夜)、悪天候(雨、濃霧、雪など)でも変わらぬ精度
- 車両のロールとピッチを補正
- 車輪前方の路面情報を300点/秒(各車輪あたり)でリアルタイム出力が可能
- 時速250km/hで走行可能
仕様
システム仕様
| Front viewモデル | Rear viewモデル | |
|---|---|---|
| 走行方向の平均分解能 | 9mm at 50km/h(速度に比例) | |
| 横方向の平均分解能 | 18mm(固定) | |
| 測定精度(高さ方向) | 2mm at 30km/h(フラットな路面) | |
| 最大計測ポイント数 | 180,000 点/秒 | |
| フレームレート | 60Hz | |
| リアルタイム出力レート | 300点/秒(1輪あたり) | ─ |
| 最大走行可能速度(*1) | 250km/h | |
| 視野角(上下方向) | 17° | 34° |
| スキャン範囲(*2) (フロントアクスルからの距離) |
0m – 13m | 2m – 9m後方 |
| 最大ステアリング角度(*3) | ±7° | ±20° |
| サイズ(W×D×H) | 幅63cm x 奥行き16cm x 高さ11cm | |
| 重量 | 約3.7kg(センサ部のみ) | |
*1 :高速走行の場合、システム付属のユニバーサルマウントキットではなく、別途固定方法を検討願います。
*2 :センサのマウントに依存。ここで記載の仕様は高さ1mの位置にセンサを設置し、10°傾けた場合。
*3 :センサのマウントに依存。ここで記載の仕様は幅1.6mの車両のフロントアクスル位置の高さ1mの場所に設置し10°傾けた場合。
データインターフェース
| Front viewモデル | Rear viewモデル | |
|---|---|---|
| リアルタイム出力 | Ethernet | |
| CANインターフェース | OBD II or DB9 | |
| オフラインデータ出力 | CSV, STL, XRC, XPC, CRG | |
| その他のインターフェース | GPS, IMU, WebCAM | |
動作環境
| Front viewモデル | Rear viewモデル | |
|---|---|---|
| 動作温度範囲 | 0 – 40℃ | |
| 保管温度 | -40 – 80℃ | |
| 湿度 | 10 – 90%(結露なきこと) | |
| IP 保護等級 | IP65 | |
電源情報
| Front viewモデル | Rear viewモデル | |
|---|---|---|
| 供給電源 | 12V DC | |
| 消費電力(コントローラ) | 90W | |
| 消費電力(センサ部) | 15W | |
システム構成
XenoTrack-RT システムパッケージ

システム構成

アライメントフレーム
アプリケーション
1. 路面性状、アスファルト舗装の調査・日常点検
MMS(モービルマッピングシステム)よりも安価でより簡便にわだち掘れ、平坦性、クラック、ポットホールの検出が可能です。
XenoTrackはあらゆる車両に搭載することができるため、専用車両を必要とせず、日常点検業務等にお使いいただけます。
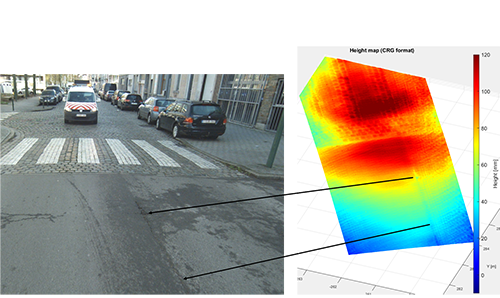
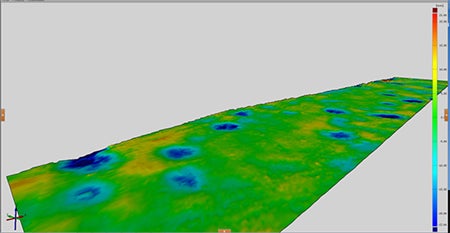
クラック、ポットホールの計測例
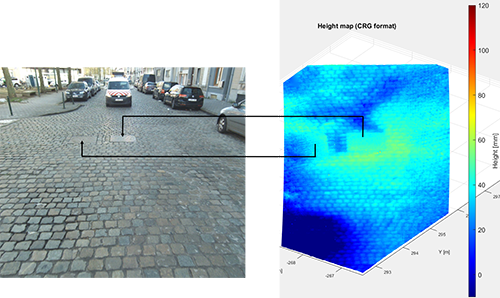
マンホールカバーの計測例
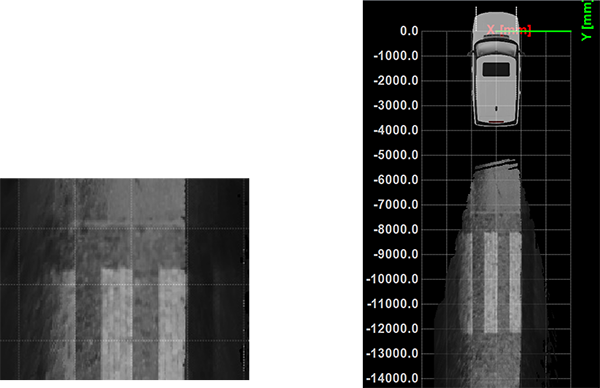
2. 白線検知、道路標示の検出
XenoTrackは路面の凹凸マッピングだけではなく、レーザーの反射強度レンジ(Intensity)でマッピングすることも可能です。白線や横断歩道、道路標示の検出ができます。道路表面の状態解析にも応用されています。
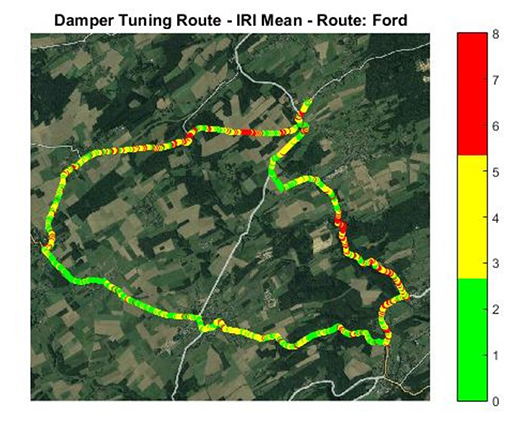
3. 路面のIRI測定
公道やテストコース等のIRI(国際ラフネス指数)を測定することが可能です。テストコースは路面プロファイルを長期にわたり一定に保つためのメンテナンスが必要であり、XenoTrackを使用すれば簡便にIRIを取得できます。
4. 滑走路メンテナンス
XenoTrackの用途は一般道路だけに限定されません。欧州では滑走路の日常点検にご使用いただいています。
XenoTrackはMMSよりも安価でより簡便にあらゆる車両に搭載することができるため、専用車両を必要としません。
5. 自動運転車両の開発
自動運転車両が安全に走行するためには道路上の走行可能エリアと落下物や穴(ポットホール)を検知し回避や停止を行う必要があります。そのための路面センシングとして、本システムを利用することができます。

道路上の落下物
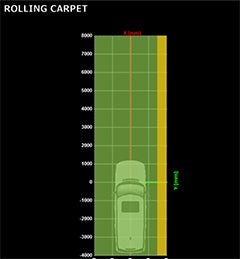
走行可能エリアの検知例
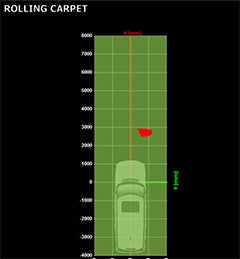
落下物の検知例
6. アクティブサスペンションの開発
車両が路面からの入力を受ける前に車両前方の路面状態を認識して制御することで路面からの振動や衝撃を消すことができます。
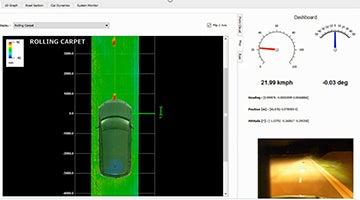
走行速度と操蛇角の情報を車両からCAN通信で入手することで本システムは走行する軌跡を計算し、車輪前方の路面の凹凸をリアルタイム出力できます。
その信号をアクティブサスペンションコントローラに入力して車両を制御することが可能です。

道路上のスピードブレーカー
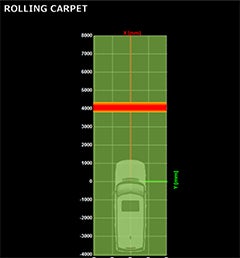
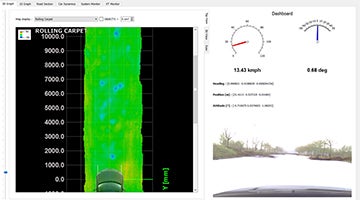
システムの検知例
リアルタイムデータストリーミング
7. 路面プロファイルを使ったシミュレーション試験
車両耐久試験に分類される疲労被害度測定(路面からの入力とシャシや部品の応力を測定して算出)はさまざまな路面での試験が要求され、実車を用いて実路を何度も走行するのは非効率です。本システムで路面プロファイルを取得しシミュレーションツールにインポートすれば、何度でも車両走行を模擬し、疲労被害度を算出することができます。
このようなデータは操縦安定性試験や乗り心地試験にも利用することができます。
路面プロファイル
8. 特異環境試験に対応
雨や霧、雪といった天候条件や、夜間などの日照条件による視界不良など、実際の交通環境で想定される走行状況を再現した室内試験場や実路での試験においても本システムを利用して路面情報を高精度に取得することができます。
夜間での計測例
雪面での計測例
デモンストレーション
カタログダウンロード

FAQ
Q. 本システムのレーザー以外の光反射が測定に影響を与えることはありませんか?
A. 影響はありません。XenoTrack-RTから照射される3,000本のレーザーは波長が一定(860nm)でCMOSイメージセンサの任意のポイントに反射して戻ってくるようにアライメント調整がなされています。ヘッドライトを点灯した対向車両/並列車両の影響について実測例を示します。
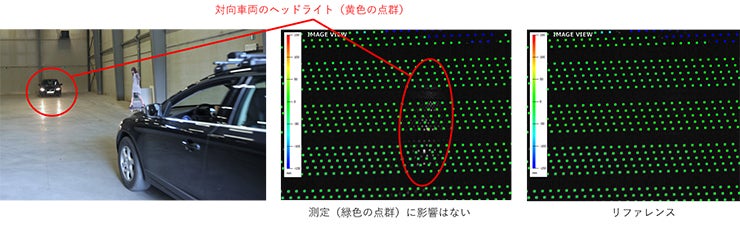
対向車両のヘッドライトによる影響
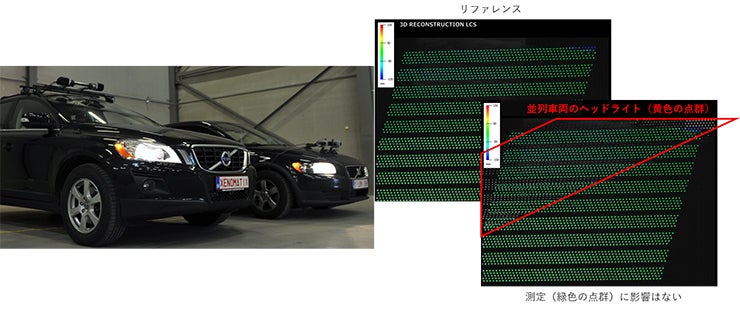
並列車両のヘッドライトによる影響