Sonic2024 ワイドバンドマルチビーム測深機

特長
- 日本国内で最もスタンダードなマルチビームソナー
- i-Construction、水路測量準拠
- リアルタイムに周波数、スワス幅変更可能
- ROBOモードによる設定・操作の自動化
- 280x170x60mmとコンパクトな船上ユニット
- 100m耐圧(オプション 4,000m、6,000m耐圧)
- 簡単な取付・操作
- 高分解能バックスキャター”TruePix”をサポート
- FLS/前方監視をサポート
テクノロジー
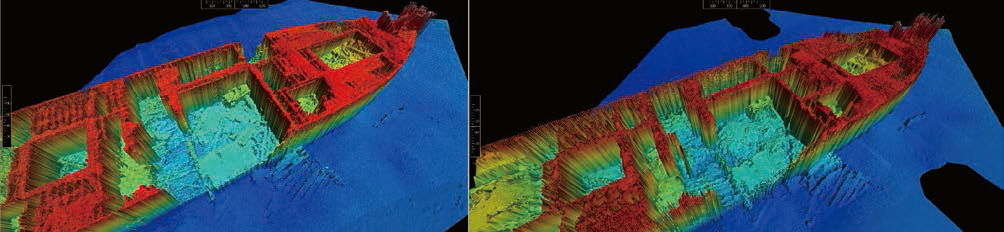
超高密度測深技術(Ultra High Density, UHD, 米国特許出願中)
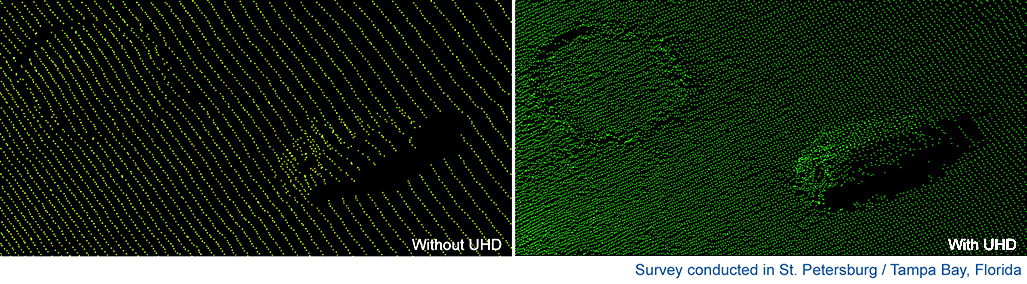
(左)従来の256点測深データ (右)UHDを用いた1024点測深データ
Sonic2024は、従来のマルチビーム測深機と異なるソナー信号処理「UHD」により、1ピングあたりの最大測深点数が1024点まで向上しています。
それでは、この「UHD」とはどのような技術なのか、解説します。
測深機でよく聞く「ビームフォーミング」って何ですか?
ビームフォーミングとは、受波器のハイドロホンに入射してくる音波信号に対し、そのビーム方向に対応するだけの時間遅延をかけて合成する技術です。これにより、ビーム方向から入射される音だけが強くなり、他は干渉しあって弱められるため、「その方向だけの音を聞いている」ということになります。
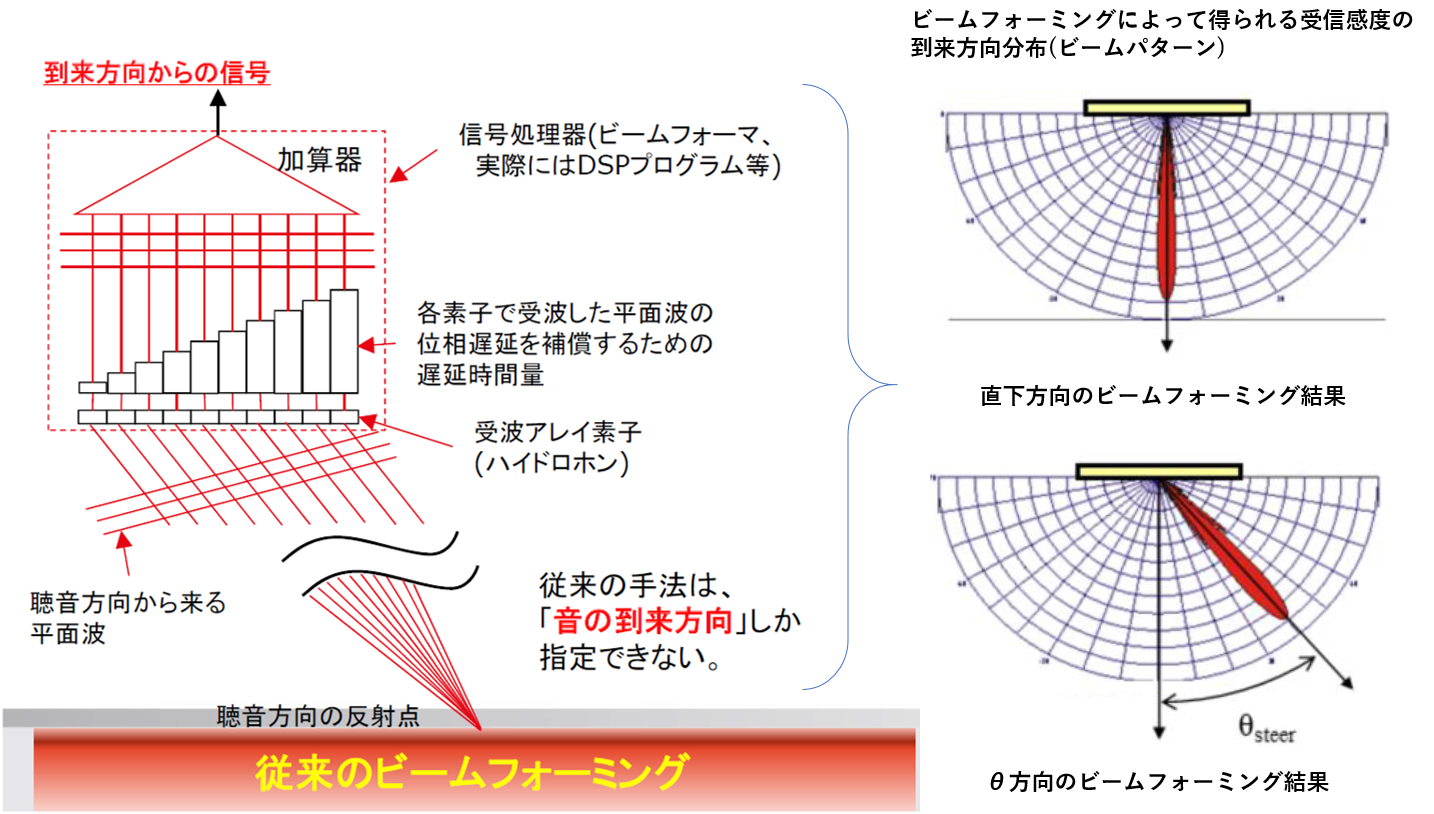
指定したビーム方向の処理波形に対し、もっとも散乱エネルギーの大きくなっている時刻に音速度をかけることで、その方向の測深計測結果(測深点)が得られます。
これを256方向分処理することにより、256点の測深点を得るのが「マルチビーム測深」ということになります。
この手法は、通常「ミルズクロス・ビームフォーミング」とか「位相シフトビームフォーミング(位相ビームフォーミング)」と呼ばれます。
位相ビームフォーミングの問題点
通常の位相ビームフォーミング処理は、受波アレイ長と使用する周波数によりビーム幅(フットプリント幅)が決まっています。
このことは次の二つの測深上の課題となります。
- 深度が深くなるとフットプリントが広くなってしまい、測深点の計測において不確かさ(TPU)が悪化する。
つまり「測深点が厳密にどこの場所の深度を示しているかがぼやける」ということです。 - 大スワス方向は位相シフトによりフットプリントが広がってしまう。
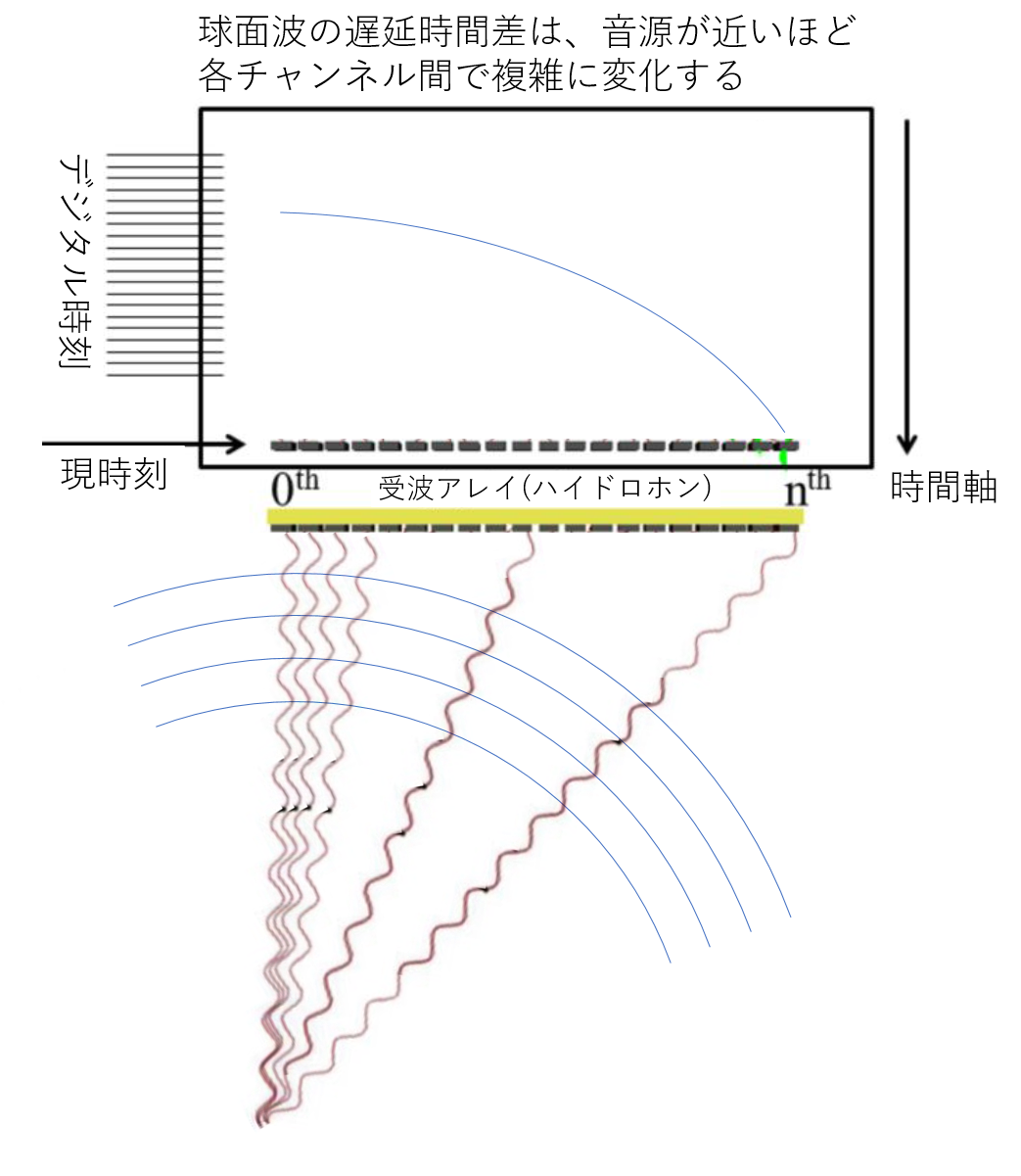
既存のビームフォーミング処理はアレイに対して平面波として到来することを仮定して位相遅延処理をかけています。これは、散乱点(音源)から十分離れた場所にある受波器にははほぼ平面波として入射するという理論的近似(遠距離音場近似)に基づいた考え方で、ある程度の水深で測深を行う場合には正しいとされています。
しかし、水深が極端に浅くなってくると散乱点(音源)と受波器との距離が近くなり、平面波近似が成り立たなくなります(近距離音場限界)。こうなるとこれまでの位相遅延式のビームフォーミングでは正確に到来方向の計算ができなくなり、フットプリント分解能が成立しなくなります。
時間方向のビームフォーミング技術「ダイナミックビームフォーカシング(DBF)」
受波アレイの各ハイドロホンで受信する時間波形に対して、特定の方向に一律に位相遅れ分の遅延処理を行うのではなく、測深点の1点めがけて全てのハイドロホン信号に最適な時間遅延をかけて足し合わせる処理を「ダイナミックビームフォーカシング」といいます。
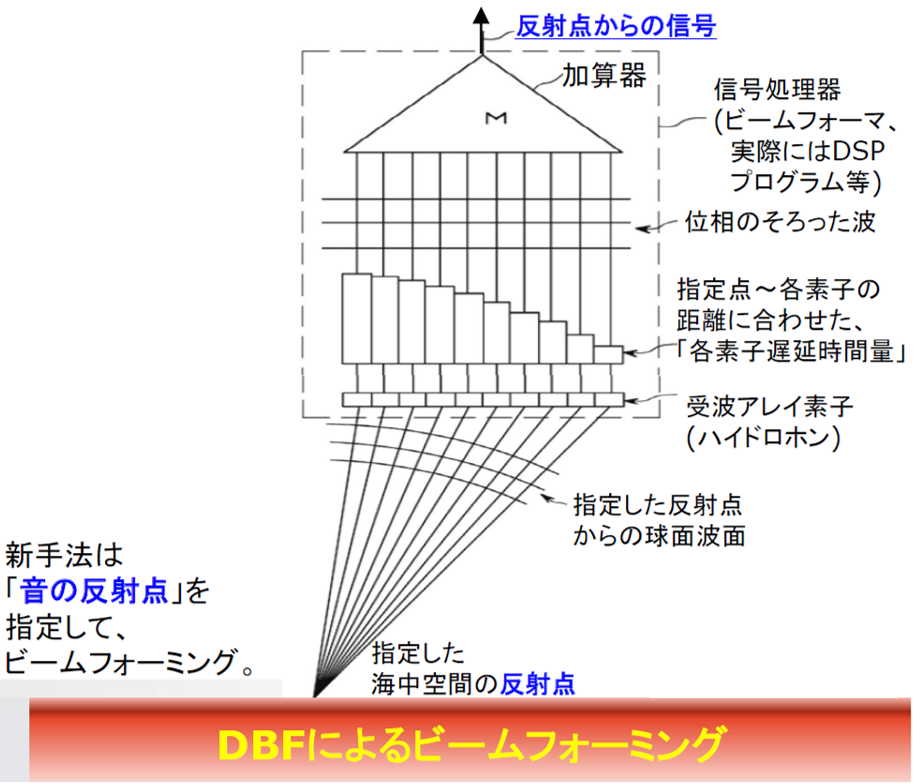
この手法は、次のような特徴があります。
「音波の到来方向に関する足し合わせ」ではなく、「音源からの到来音波の足し合わせ」でフォーカシング
つまり、「ある音源点」に対してのみフォーカスするため、フットプリントではなくピンポイントからの音波を受信することができ、超高分解能の測深点(フットプリント0※1)が実現できます。
より高精細な水中測深が可能
ピンポイントの測深点計測のため、いわゆる「フォーカシング方向」をいくらでも細かくすることができ、きわめて高密度の測深点群を生成できます※2。
この処理は、ソナー以外では合成開口レーダなどで合成開口処理の際に使用されています。
※1
厳密にはパルス幅(時間分解能)に依存するため、0にはなりませんが、それでも位相シフト方式に比べて桁違いに分解能はよくなります。
※2
ただし、時間分解能による制限のほか、計測する方向を増やせば増やすほど処理不可は大きくなるため、どこかでシステムとしての計測能力の限界となります。
では、「UHD」は「ダイナミックビームフォーカシング」なのか?
ダイナミックビームフォーカシング技術は、きわめて高いビームフォーカス精度を実現できると共に、非常に処理負荷の高い技術となります。
測深深度が不明な場所においてダイナミックビームフォーカシングを行うことは、水中空間に対して膨大な演算処理を行うことになるからです。
このため、UHDでは受信波形に対して、従来のビームフォーミングを行って測深スワスデータを生成し、その深度付近でダイナミックビームフォーカシングを行います。
これにより、処理不可を最小限にしつつ可能な限り多数の高精度測深点データを得ることができるようになります(特許出願中のため詳細は非公開)。
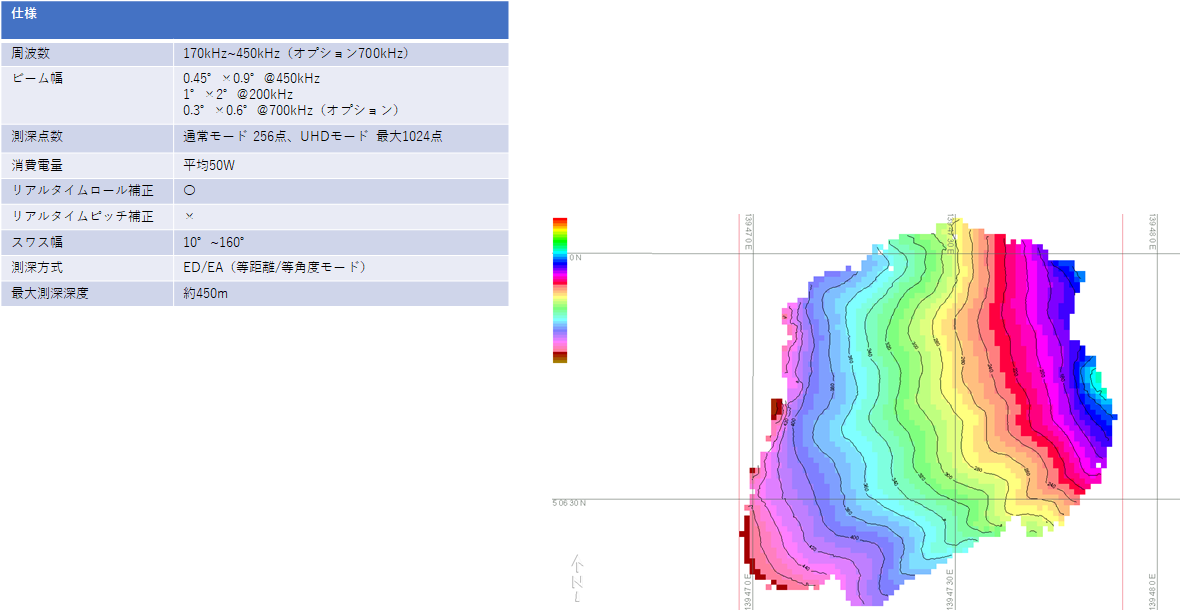
仕様
オプション
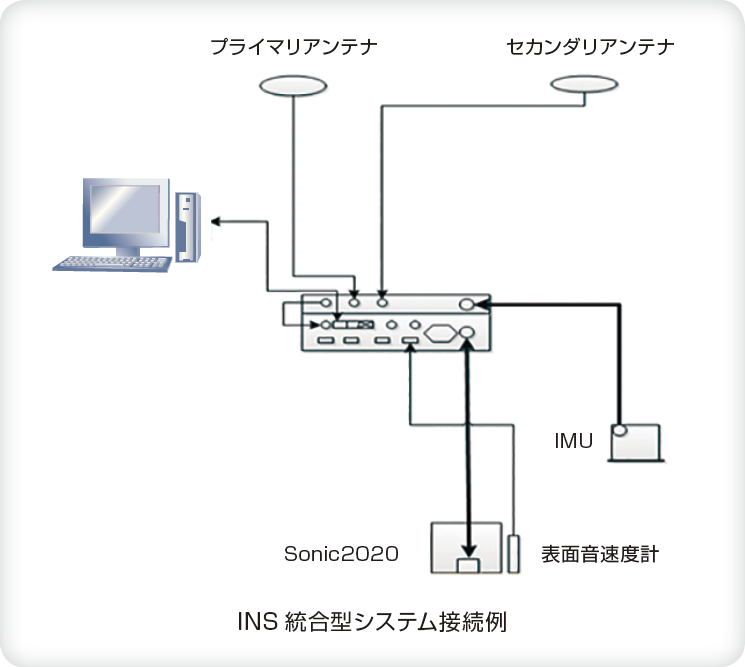
INS統合型(I2NS)インターフェースオプション

Sonicの送受波器と制御用PCを結ぶSIM(Sonar Interface Module)に、定評のあるApplanix社製POS MVの基板を統合したモジュールオプションです。
ソナーをご購入の際に選択いただけます。
POS MVを統合することにより、POS MVの受信処理装置が不要となるため、送受波器、I2NSモジュール、IMU、PC、表面音速度計のみの非常にシンプルな機器構成で計測が実現できます。
UHRオプション
(左)700kHz計測データ (右)400kHz計測データ
700kHzの高周波を使用できるようにすることにより、標準仕様の場合よりも更に高分解能(ビーム幅0.3°×0.6°)での詳細な測深が可能となります。
パイプライン調査、ケーブル敷設状況の確認、水中考古学調査やその他の高い地形計測解像度が要求されるアプリケーションで効果を発揮します。
700kHz運用時の最大スワス幅は60°になります。
TruePix™オプション
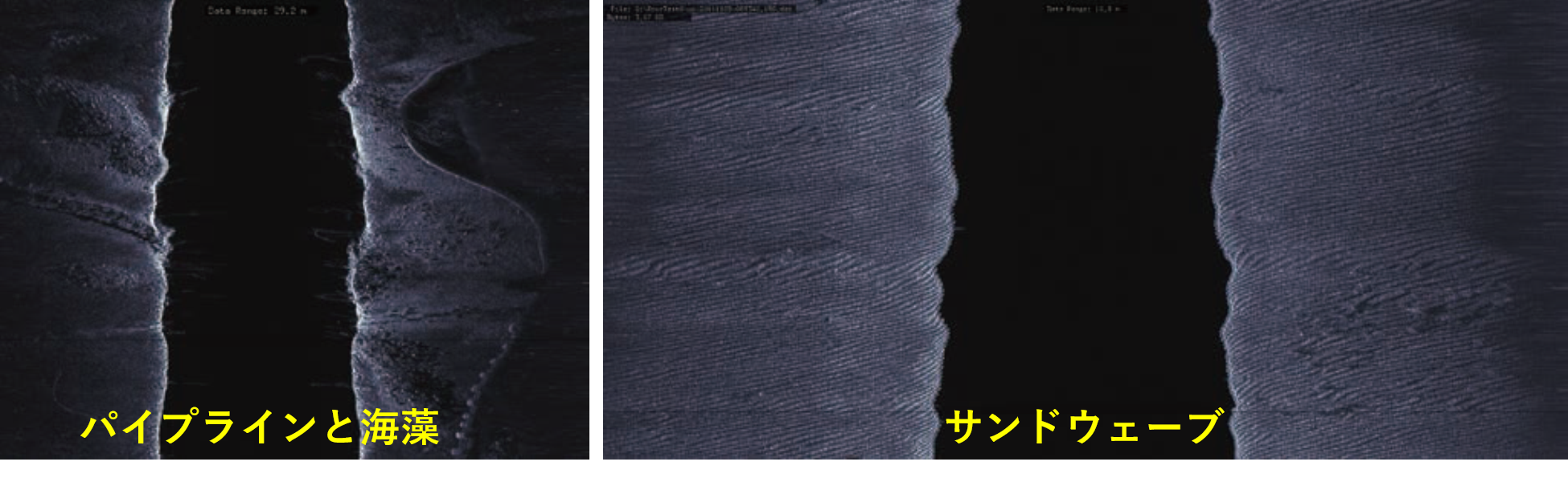
海底に到達した音波を時間情報で整理しなおし、R2Sonic社独自のソナー信号処理アルゴリズムを用いて後方散乱強度の情報をサイドスキャンイメージとし、測深情報も組み合わせることによって正確な海底の画像情報を生成します。
従来のサイドスキャンソナー画像やSnippetsよりも安定したデータが得られるため、生態系の調査や底質調査の参考情報として利用可能です。
ウォーターカラムイメージ(Water Colomun Image, WCI)
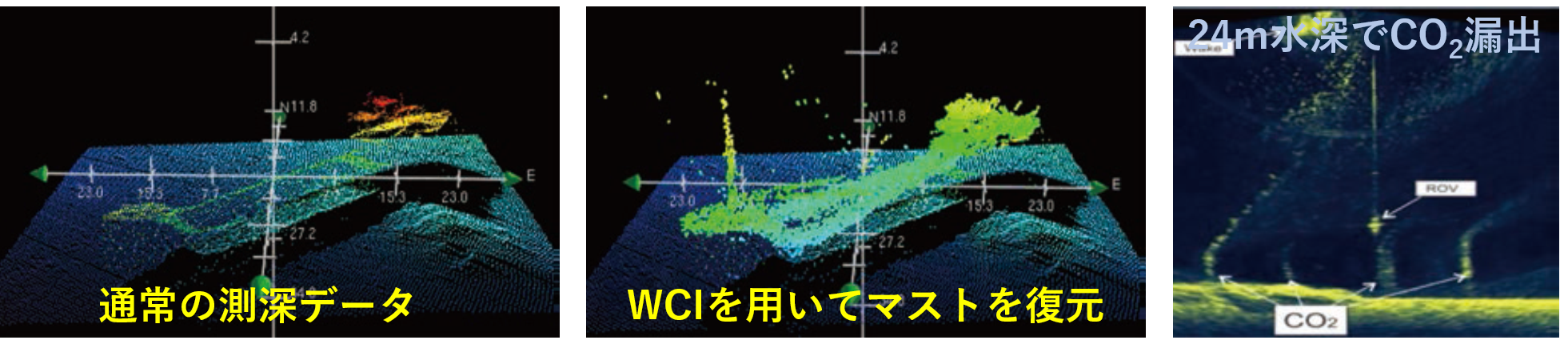
ソナー直下から海底までの、全ての水中部の音響散乱体イメージを取得します。測深機による海底検出信号処理では計測の難しい海底以外の小さな水中構造物の検出が可能になります。
本オプションにより海底以外のデータの再評価が後処理時に可能になることで、港湾付近の水路測量における最浅深度計測や、パイプラインのからの漏出、熱水/海底噴出物の探査、水産資源評価などの幅広いアプリケーションに対応できます。
前方観測ソナー(Forward Looking Sonar, FLS)
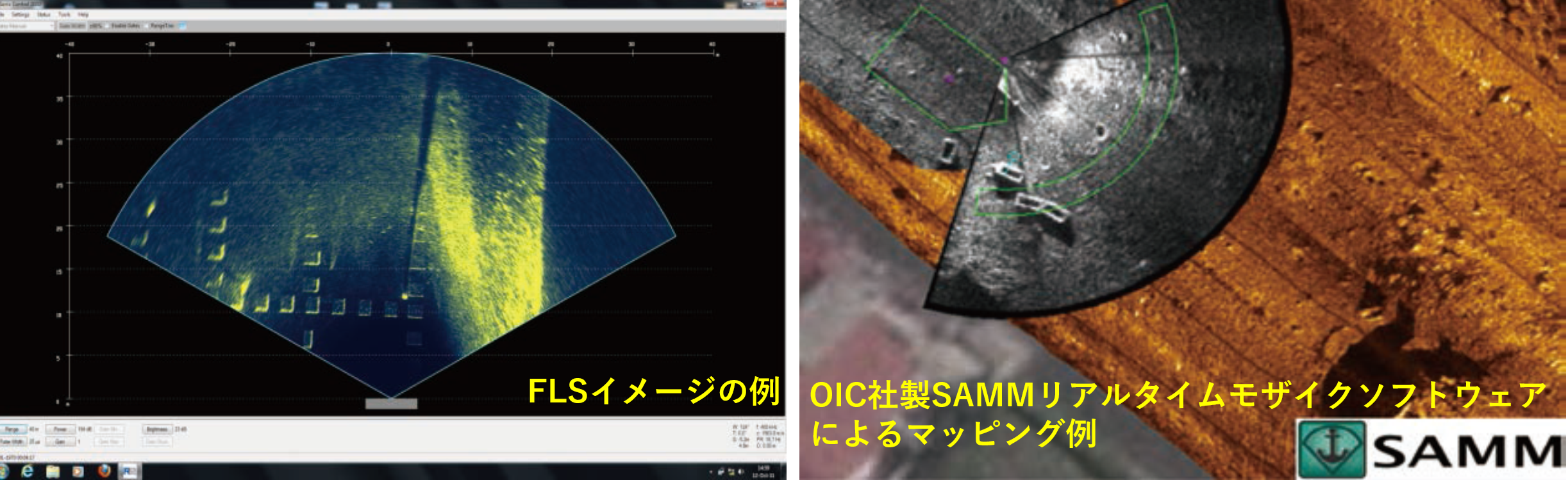
測深機(鉛直下に音を送受信)ではなく、前方を観測することにより、水中のイメージングソナーにする技術です。光では届かない長レンジ(数十~数百m)の広範囲の水中映像をリアルタイムで取得することが可能になります。専用のチルト(傾斜)ユニットをあわせて使用することで、観測時の俯角を簡単に調整できます。
また、サードパーティ製のリアルタイムモザイクマッピングソフトウェアを組み合わせることで、データ収録と同時にリアルタイムのFLSイメージのモザイクマッピングが可能になります。
深海用高耐圧オプション
深海向けROV/AUV荷搭載するためのオプションとして、水深4000m又は6000mに対応する高耐圧ハウジングオプションです。防汚オプション
ソナーヘッド(送受波器)に対して海洋生物や汚れの付着を防ぎ、耐環境性を更に向上させるコーティングを施したオプションです。メンテナンスは石鹸などでソナーヘッド表面を軽く洗い流すだけで十分です。
比較表
| 測深レンジ | 品名 | 方式 | 周波数 | ビーム幅 |
|---|---|---|---|---|
| 75m以上 | Sonic2020 | クロスファンビーム方式 | 200~400kHz | 400kHz : 2°× 2° 200kHz : 4°× 4° |
| 400m以上 | Sonic2022 | クロスファンビーム方式 | 170~450kHz, 700kHz | 700kHz : 0.6× 0.6° 450kHz : 0.9°× 0.9° 200kHz : 2°× 2° |
| 400m以上 | Sonic2024 | クロスファンビーム方式 | 170~450kHz, 700kHz | 700kHz : 0.3°× 0.6° 400kHz : 0.45°× 0.9° 200kHz : 1°× 2° |
| 600m以上 | Sonic2026 | クロスファンビーム方式 | 100kHz, 170~450kHz, |
450kHz : 0.45°× 0.45° 200kHz : 1°× 1° 100kHz: 2°×2° |