ステアリングロボットシステム

Hi-TEC 社ステアリングロボットはハンドルを全自動/ 半自動で各種実走行試験を簡単に各種自動車に取り付けられます。ハンドルを高再現性で動作させることができ、例として 横加速度やヨーレート、ロール角、操舵力等のレスポンスタイム、応答遅れ、定常ゲイン、オーバーシュート等を試験します。
特長
試験に合わせて3 種類のステアリングロボットラインナップ
- 簡単装着:一か所をレンチで締め付けることにより簡単にハンドルにロボット装着が可能
- タッチパネルで簡単設定:すべての設定を行うタッチスクリーンモニタはフロントウィンドウに吸盤で取付
- ブレーキロボット(オプション)装着可能
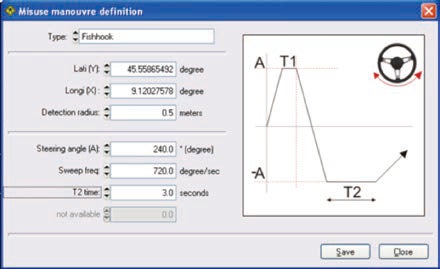
フィッシュフックテストのステアリング動作

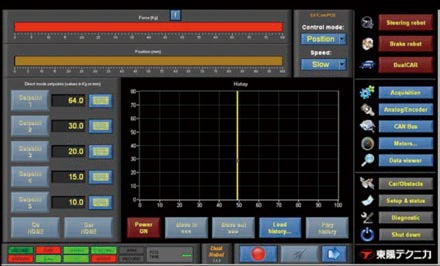
運転席でタッチパネルでの試験設定
最も汎用的なモデル DR260B10 型 エアバッグ動作可能
※小型モデルDR175B15 等仕様はラインナップをご参照下さい。

タッチスクリーンモニタ
タッチパネルで簡単にすべてのパラメータ入力が可能です。
ジョイステックコントローラ
ジョイスティックは、いくつかの機能があります。
試験中にジョイスティックを左右方向へ傾斜させると手動で車 両を操舵できます。スティック奥のボタンは、デッドマンハンドルボタンで電力供給のため試験中ボタンは押し続けなければなりません。上部ボタンはテストを開始するためのスタートボタンです。通常 吸盤を使って運転席のサイドウィンドウに装着します。また、テストコースへ車両を移動させるときにも使用されます。

緊急リリースBOX
緊急リリースボタンは、電源とモータの接続を切断し手動でハンドルを操作できます。

テクノロジー
ロボット動作でのスラロームとレーンチェンジ (再生できない場合はこちらから)


このシステムは ステアリングロボットのみ(アプリケーションによってはブレーキロボット)をコントロールし、テストドライバーがアクセルを踏み、スタートボタンでステアリングロボットが動作します。これによりJターン・フィッシュフック・レーンチェンジ・スラローム等のステアリングコントロールを高再現で行うことができます。
仕様
モータ
| モータ種類 | ダイレクトドライブモータ |
|---|---|
| 最大トルク | 88Nm(1080dig/sec 時) |
| レーティッドトルク | 41Nm(2100dig/sec 時) |
| 最高回転数 | 3600dig/sec |
| 最大加速度 | 8240 dig/sec2 |
| 重量 | 約11kg( 治具等含む) |
| 無電源時の残留トルク | > 0.5Nm 以下 |
センサ
| ロードセル(トルク計測用) | 200N まで |
|---|---|
| エンコーダ | 12bit 分解能 |
電源部(外付け)
| モータ | 200N まで |
|---|---|
| 電源ユニット | 12bit 分解能 |
| 標準電流消費 | 12bit 分解能 |
| 取り付け方 | 1 箇所をリアウィンドに吸着カップで固定および1 箇所床で支え。 |
| その他 | GPS 制御実車走行試験でも使用可能 |
ハードウェア構成
ステアリングロボット

DR140

DR210
- DR93DD70 型 ピークトルク:30Nm @350rpm
- DR140DD50 型 ピークトルク:63Nm@350rpm
- DR210DD30 型 ピークトルク:97Nm@200rpm
コントロールユニット
- コントロールCPU
- ドライバ データロガー
- DC/DC コンバータ
ブレーキロボット(オプション)

- BR66P8 型 最大荷重:800N
パワーユニット

- ステアリングロボットドライバ
- DC/AC コンバータ
- 車載コントロールユニット &パワーユニット
ラインアップ
| ステッピングモータシリーズ(GPS 制御自動運転ロボット用) | ダイレクトドライブシリーズ(主にステアリングロボットシステム用) | |||||
|---|---|---|---|---|---|---|
| DR66PS50 | DR66H100 | DR98PS10 | DR93DD70 | DR140DD50 | DR210DD30 | |
| 圧着グリップ | お薦めしません | お薦めしません | 可 | 可 | 可 | 可 |
| 軽量グリップ | 推奨 | 推奨 | 可 | 可 | 可 | 不可 |
| モータタイプ | ARM66AK-PS50 | ARM66AK-H100 | ARM98AK-PS10 | TECHNAI MK-CI 93-70 |
TECHNAI MK-CI 140-50 |
TECHNAI MK-CI 210-30 |
| 最大トルク [Nm] | 20 @ 38 rpm | 28 @ 25 rpm | 35 | 30 @ 350 rpm | 63 @ 350 rpm | 97 @ 200 rpm |
| 連続トルク [Nm] | 8 | 8 | 20 @ 200 rpm | 16.5 @ 350 rpm | 33.2 @ 350 rpm | 45 @ 300 rpm |
| ストールトルク [Nm] | 8 | 8 | 20 | 5.6 | 11.1 | 16.8 |
| 最高回転数 [rpm] | 60 | 30 | 200 | 350 | 350 | 200 |
| モータ重量 [kg] | 7 | 7 | 9 | 8 | 11 | 19.2 |
| 電源 | コントロールユニットより供給 DC/DC コンバータ |
コントロールユニットより供給 DC/DC コンバータ |
コントロールユニットより供給 DC/DC コンバータ |
外付け電源 | 外付け電源 | 外付け電源 |
 DR66PS50  DR98PS10 |
 DR140DD50  DR210DD30 |
|||||
| 中空型ダイレクトモタシリーズ(ステアリングシステム用) | ||
|---|---|---|
| DR260B10 | DR175B15 | |
| オンステアリンググリップ | リムーバブル | ライトグリッパ |
| エアバック開閉用中空半径 | 195 | 93 |
| 取り付け方法 | フロントウィンドウへ空気圧着カップ(1 または2)で取付 | 運転シートから柱でささえる。 ※ DR66PS50 の写真と同様 |
| モータタイプ | TECHNAI MK-CS 260-10 |
MK-CS 175-15 |
| 最大トルク [Nm] | 88 @ 180 rpm | 30 @ 20 rpm |
| 連続トルク [Nm] | 41 @ 350 rpm | 8.3 |
| ストールトルク [Nm] | 10 | 8.3 |
| 最高回転数 [rpm] | 600 | 280 |
| モータ重量 [kg] | 10.5 | 7.5 |
| 電源 | バックアップ用バッテリ付 外付け電源(48V) | バックアップ用バッテリ付 外付け電源(48V) |
 R260B10 |
 DR175B15 |
|
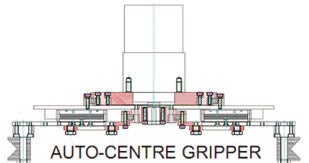
■ 圧着グリップ:
図の様に1 箇所のねじ調整でステアリング外側より圧着固定。中心がとりやすいというメリットがあります。
■ 軽量グリップ:
軽量化に徹したステアリング外側を3 箇所ねじ止め。衝撃試験等で脱落の危険がありません。
FAQ
機能
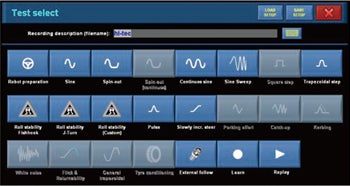
タッチパネルのSelect ウィンドウにはテスト項目が一覧表示され簡単に設定可能です。

1. サインテスト (Sine test)
指定の振幅及び周波数で1 周期のサイン操舵をおこないます。

2. スピンアウトテスト (Spin out test)
振幅、周波数、ステアリング保持時間、振幅比(後半周期/ 前半周期)を指定した1 周期のサイン操舵をおこないます。

3. 連続サインテスト (Continuous sine test)
指定の振幅及び周波数でサイン操舵を連続でおこないます。

4. サインスイープテスト (Sine sweep test)
所定のサイン操舵を連続でおこないます。 周波数はStart frequency からStop frequency まで連続的に変化します。

5. 台形ステップテスト (Trapezoidal step test)
指定されたパラメータに応じて台形状の操舵パターンを実行します。

6. フィッシュフックテスト (Fishhook)
NTHSA が提案した車両のハンドリング/ ロールオーバテストに基づいており、車両のロール共振を励起するために反対方向の2つの連続する操舵で構成されています。

7. Jターンテスト (J-Turn)
NTHSA が提案した車両のハンドリング/ ロールオーバテストに基づいており、以下に示すように台形状のテストで構成されています。
J-Turn テストと台形ステップテストの違いは、J-Turn テストにおいては試験中の回転速度とは別にテスト開始時のステアリングホ イール角度まで戻るための速度を設定できることです。

8. ロール・スタビリティ・テスト (Custom)
ロール・スタビリィティ・テストでは最大3 回のターンを自由に 組合せてテストパターンを構成します。
ターン毎に独立してAmplitude(ステアリングの操舵角度)、Velocity(操舵速度:°/ 秒)、Dwell(ステアリング保持時間)が指定できます。

9. パルステスト (Pulse test)
パルステストではAmplitude(ステアリングの操舵角度)と Duration(継続時間)の2 つのパラメータを指定します。

10. 緩増加操舵テスト (Slowly increase steer test)
緩増加操舵テストはテスト車両の横運動安定性を確認するためのテストでSAE J266 に定められた Constant Speed, Variable Steer に基づいています。

11. 外部入力テスト (External follow test)
アナログ入力チャンネルの一つに入力した外部信号で操舵させる事ができます。

12. 記録/再現テスト (Learn and replay test)
記録/ 再現テストではドライバーが手動で実行した操舵パターン(操舵角度)を記録し再現します。
記録した操舵パターンを直ちに再現できます。
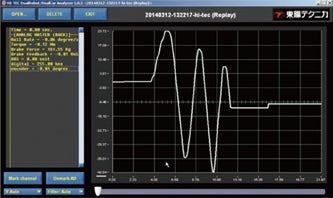
記録モードでのデータ取り込み例
※その他特注にて試験パターンを承ります
ご発注までの流れ
次に、お客様の所有のテストコース、または、日本自動車研究所等の貸出可能なテストコースをスケジューリングしていただき試験車を確保の上、デモンストレーションを行わせていただきます。
ご発注までの主な流れ

●お打ち合わせ
自動運転の種類・パターンの決定
(S 字、定常円旋回、等)
その他内容
(計測パラメータ 等)
↓
●ご要望によりデモンストレーション
スケジュール、デモフィールド確保等
↓
●お見積り
↓
●ご発注
メールでのお問い合わせ デモンストレーション 詳細説明のご要求は
→東陽フォームの資料請求へお電話でのお問い合わせ:
株式会社東陽テクニカ オートモーティブ・ソリューション部 ドライビングロボット担当
03-3279-0771