路面性状計測システム TN-Twin Tracker


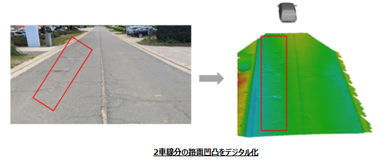
路面性状計測システム「TN-Twin Tracker」は、従来センサーのレーザー本数を増設することで測定範囲を拡張し、高速道路での時速80km走行時でも走行車線と追越車線の2車線分の路面プロファイルの測定が可能です。また、高速道路だけではなく一般道路においても使用できるため、道路管理、車両耐久試験や乗り心地試験といった自動車開発、運転支援開発、テストコース管理などでも利用できます。
◆TN-Twin Trackerの研究論文が発表されております。
「3DLidarによる路面プロファイル計測の検証」(第68回土木計画学研究発表会)論文のダウンロードはこちら
◆展示会レポート
「ハイウェイテクノフェア2023」のレポートはこちら
特長
- 2車線分の路面高さデータを取得(横幅7.5m/地上高2mの位置にセンサーを設置した場合)
- トンネル内もデータ取得が可能
- AutoStop Start機能・エンジンon/off機能
- 路面データの画像(動画)出力機能
- IRI(国際ラフネス指数)・わだち掘れ量計測ソフトウェア用csvファイルの出力
仕様
システム仕様
TN-Twin Tracker センサー本体
| 項目 | 値 |
|---|---|
| 測定範囲 | 左右:7.5m センサーより2.9m ~ 6.4m後方 ※高さ2mのセンサー位置 |
| 視野角 | 水平:60度 垂直:20度 |
| 平均分解能 進行方向(@50-80km/h) |
8 - 11mm (進行方向、左右方向ともに) |
| 高さ精度 | <0.65mm(静止状態) |
| 測定点数 | 1,120,000点/sec 以上 |
| フレームレート | 40Hz |
| レーザークラス | クラス1 |
| 防水性能 | IP65 |
| 動作温度 | -10℃~50℃ |
| 保管温度 | -40℃~70℃ |
| 相対湿度 | 10 - 90% 結露なきこと |
| 取付高さ範囲 | 1.8m~2.2m |
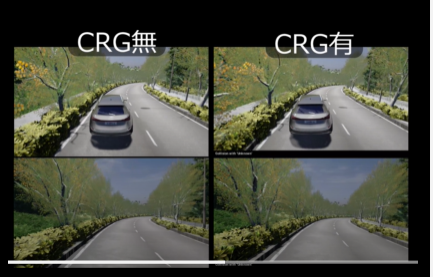
| 出力データフォーマット | CSV, STL, BIN, CRG, LAS |
| センサー寸法(W x D x H) | 46.7 cm x 19.7 cm x 12 cm |
| センサー重量 | 2.6kg |
| センサー消費電力 | 20.5W |
| X-Controller 寸法 | 10.6 cm x 14 cm x 5.5 cm |
| X-Controller 重量 | 650 g |
| X-Controller 消費電力 | 4.5W (X-Stationを除く) |
GPSレシーバ
| 項目 | 値 |
|---|---|
| 測位精度 | 単独測位 水平1.2 m 垂直1.9 m SBAS 水平0.6 m 垂直0.8 m |
| RTK性能 | 水平 0.6 cm + 0.5ppm 垂直 1cm + 1ppm |
| 最大更新レート | 位置 200Hz |
| 寸法 | 10.2 cm x 3.6 cm x 11.8 cm |
| 重量 | 490 g |
| 電圧 | 4.5~36Vdc |
X-Station
| 項目 | 値 |
|---|---|
| プロセッサ | Intel Core i7 3.8GHz 8 Core |
| メモリ | 2 DDR4 26666MHz 64GB |
| OS | Windows 10 |
| シリアル | 4 COM RS-232 |
| USB | 6 x USB 3.1 External 1 x USB 2.0 Internal |
| Isolated DIO | 32 isolated DIO : 16 DI, 16 DO |
| SIMカード | 3 External SIM Card Socket (別途SIMカードと回線が必要です) |
| PCIe | 1 PCIe 16 Slot with x 16 signal 1 PCIe 16 Slot with x4 signal |
| グラフィック | Intel UHD Graphics 630 |
| ストレージ | 2 TB |
| イーサネット | 6 ポート (LAN3-6はPoE) |
| 電源 | 12-36Vdc 130W |
| イグニッション | 16モード |
| 寸法 | 26 cm x 21.5 cm x 10.4 cm |
| 質量 | 5.5 kg |
| 動作温度 | -20℃~+45℃ |
| 保管温度 | -40℃~+85℃ |
| 相対湿度 | 5%~95%結露無きこと |
システム構成
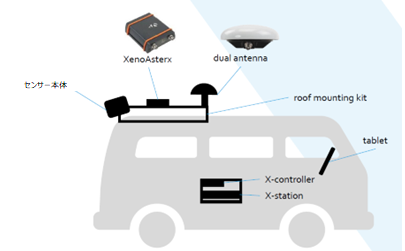
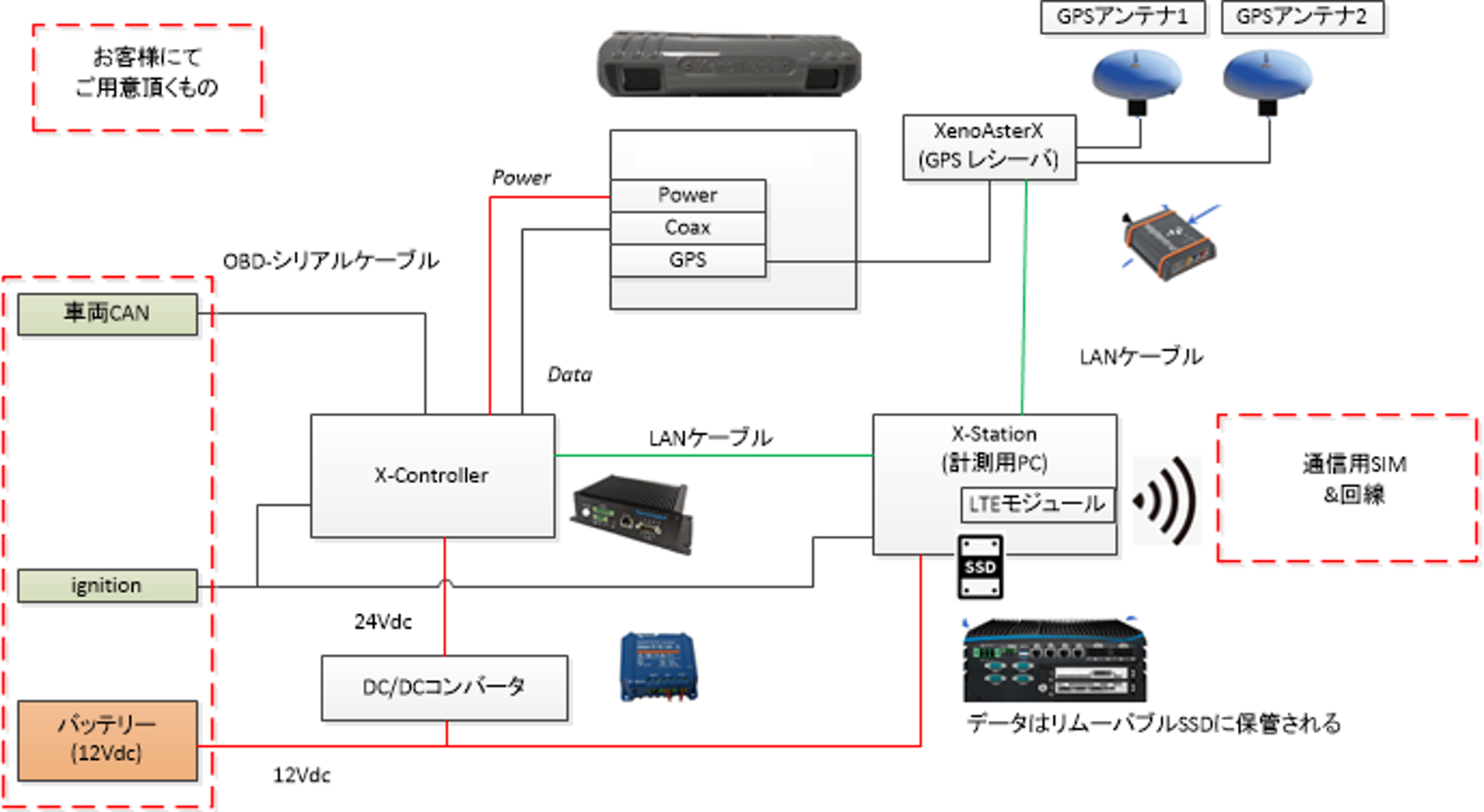
TN-Twin Tracker システム構成品
- TN-Twin Trackerセンサー
- アライメントキット
- X-controller(点群データとGPSデータを取得)
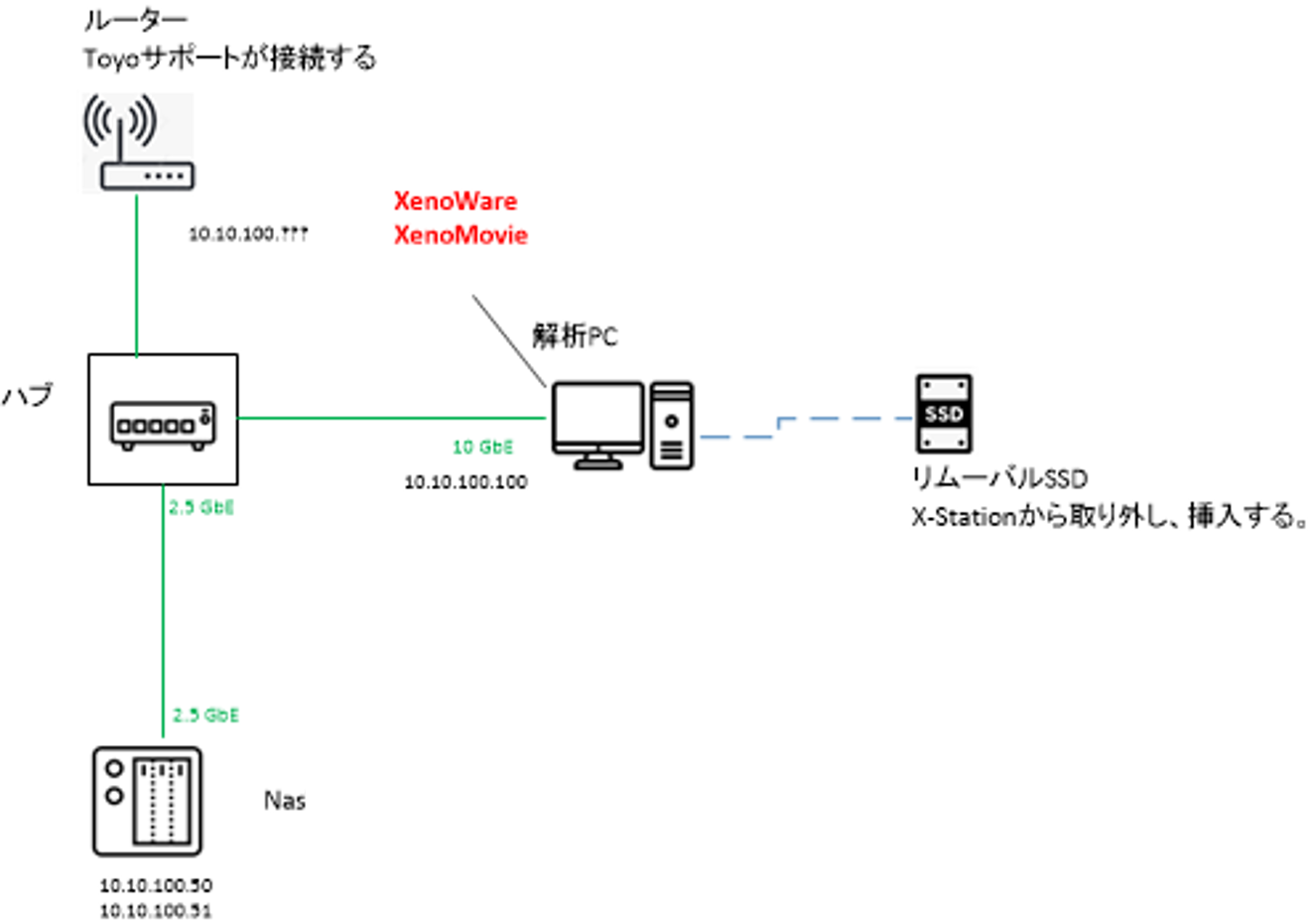
- X-Station(点群から路面データを生成する計測用PC)
- DC-DCコンバーター
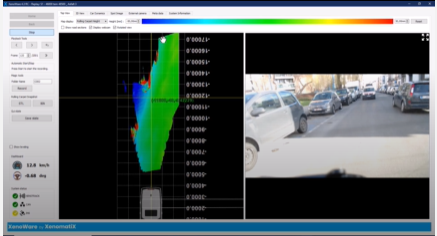
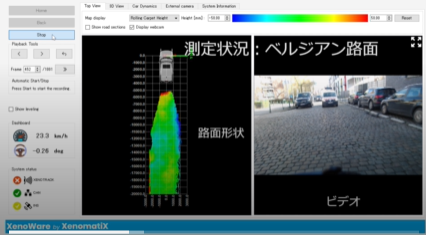
- XenoWare (X-Station内のメインソフトウェア)
- イグニッション&車速連動測定機能
- CANインターフェイスキット(車速とハンドル角を取得)
- XenoAsterx RTK-GNSS + INS(デュアルアンテナ付き)
- Digital Road Plus(トンネル内の高精度路面作成)
- 路面データ画像ファイル外部出力機能
- ルーフマウンティングキット(オプション)
- データ確認用タブレット(オプション)
アプリケーション
1. 路面性状、アスファルト舗装の調査・日常点検
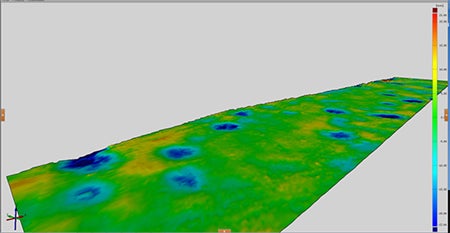
MMS(モービルマッピングシステム)よりも安価でより簡便にわだち掘れ、平坦性、クラック、ポットホールの検出が可能です。
TN-Twin Trackerはあらゆる車両に搭載することができるため、専用車両を必要とせず、日常点検業務等にお使いいただけます。
クラック、ポットホールの計測例
マンホールカバーの計測例
2. 白線検知、道路標示の検出
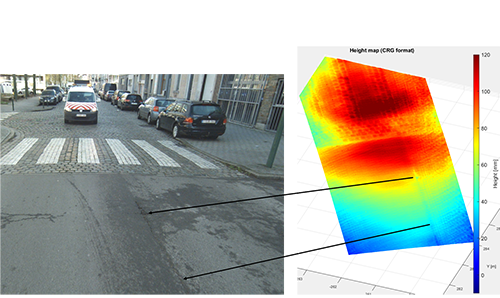
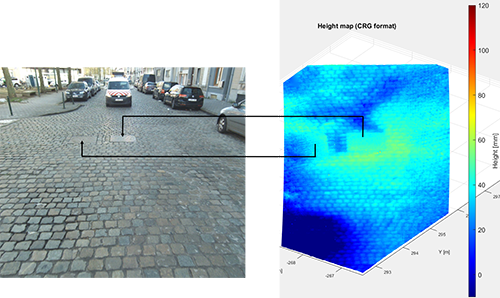
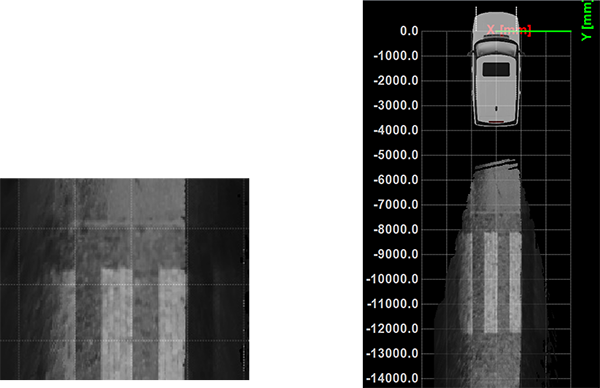
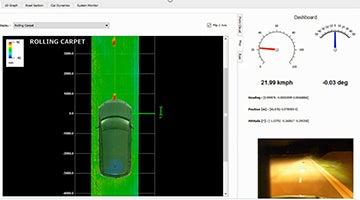
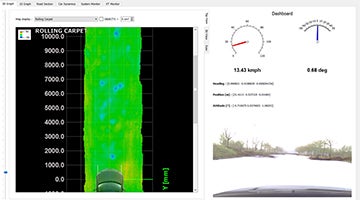
TN-Twin Trackerは路面の凹凸マッピングだけではなく、レーザーの反射強度レンジ(Intensity)でマッピングすることも可能です。白線や横断歩道、道路標示の検出ができます。道路表面の状態解析にも応用されています。
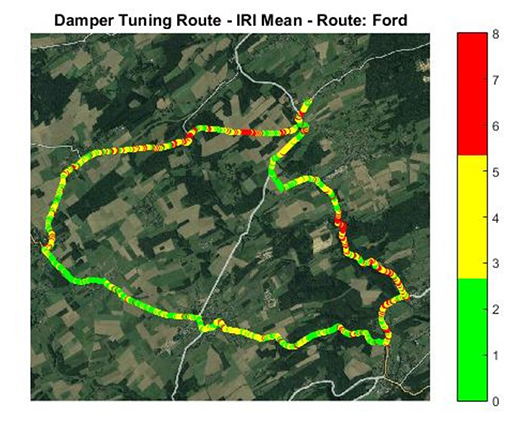
3. 路面のIRI測定
公道やテストコース等のIRI(国際ラフネス指数)を測定することが可能です。テストコースは路面プロファイルを長期にわたり一定に保つためのメンテナンスが必要であり、TN-Twin Trackerを使用すれば簡便にIRIを取得できます。
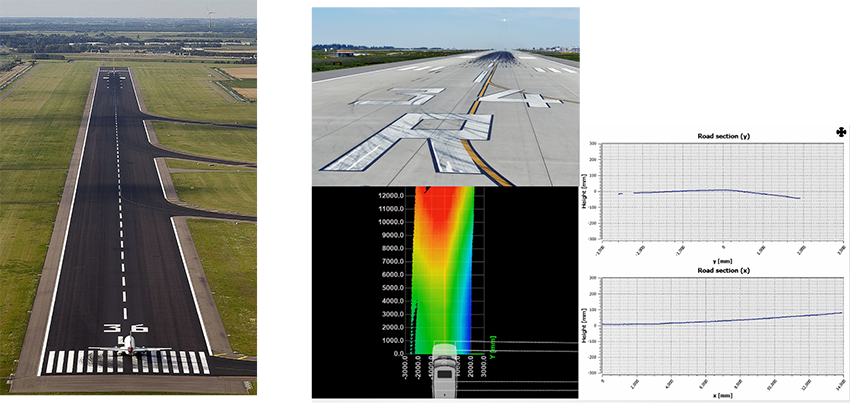
4. 滑走路メンテナンス
TN-Twin Trackerの用途は一般道路だけに限定されません。欧州では滑走路の日常点検にご使用いただいています。
TN-Twin TrackerはMMSよりも安価でより簡便にあらゆる車両に搭載することができるため、専用車両を必要としません。
5. 自動運転車両の開発
自動運転車両が安全に走行するためには道路上の走行可能エリアと落下物や穴(ポットホール)を検知し回避や停止を行う必要があります。そのための路面センシングとして、本システムを利用することができます。

道路上の落下物
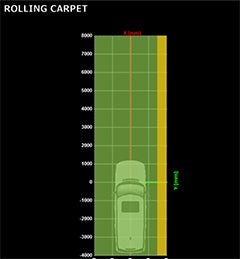
走行可能エリアの検知例
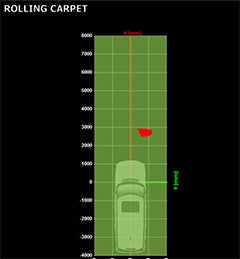
落下物の検知例
6. 路面プロファイルを使ったシミュレーション試験
車両耐久試験に分類される疲労被害度測定(路面からの入力とシャシや部品の応力を測定して算出)はさまざまな路面での試験が要求され、実車を用いて実路を何度も走行するのは非効率です。本システムで路面プロファイルを取得しシミュレーションツールにインポートすれば、何度でも車両走行を模擬し、疲労被害度を算出することができます。
このようなデータは操縦安定性試験や乗り心地試験にも利用することができます。
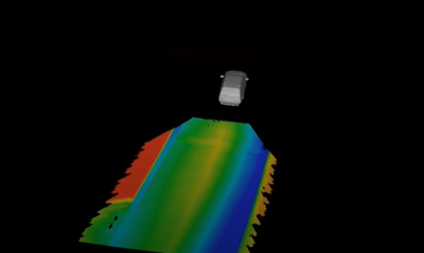
路面プロファイル
7. 特異環境試験に対応
雨や霧、雪といった天候条件や、夜間などの日照条件による視界不良など、実際の交通環境で想定される走行状況を再現した室内試験場や実路での試験においても本システムを利用して路面情報を高精度に取得することができます。
夜間での計測例
雪面での計測例
FAQ
- Q:
- システムの価格を教えてください。
- A:
- 選択する構成品の内容や為替の影響によりますので、別途お見積りとさせてください。
- Q:
- システムの納期にはどれくらいかかりますか?
- A:
- 2-3ヶ月でお納め可能です。
- Q:
- 複数台(量産)の注文は可能ですか?
- A:
- 可能です。
5台、10台、15台といったバルクオーダーが可能です。
数量によりディスカウントもございますので別途お見積りとさせてください。
- Q:
- デモ測定は可能ですか?
- A:
- 可能です。
測定場所によっては交通費や技術費用を頂く可能性がございますので別途お見積りとさせてください。
- Q:
- レンタルは可能ですか?
- A:
- 可能です。
レンタル期間に応じて金額が異なりますので別途お見積りとさせてください。
- Q:
- 受託測定は可能ですか?
- A:
- 可能です。
測定距離と成果物の内容に応じて金額が異なりますので別途お見積りとさせてください。
- Q:
- 今回の開発のポイントは?
- A:
- 1車線幅をmm精度で計測する技術を応用し2車線幅に拡張したことです。
一般的なLiDARで2車線幅を計測することはできますがcm精度のため道路管理のための路面性状調査では使用できませんでした。
- Q:
- 「性状」計測と「形状」計測の違いはなんですか?
- A:
- 路面性状は時間の経過とともに車両の走行荷重などにより起きる路面の劣化や傷みのことで、IRI、轍ぼれ量、ポットホール率、クラック率といった指標を表し、形状よりも限定的な意味をもちます。
- Q:
- 三角測量の特許技術とはどのようなことでしょうか?
- A:
- レーザー1本での三角測量は一般的な計測技術です。
複数本のレーザーを同時に照射し同時に三角測量する技術で日本でも特許番号を取得できています。
(特許番号:JP6387407 B2)
- Q:
- MMS(モービルマッピングシステム)との違いをおしえてください。?
- A:
- MMSはLiDARとカメラの複合システムです。MMSで使用しているLiDARはTOF方式でありcm精度です。
本システムは唯一無二のマルチビーム三角測量式でありmm精度を達成しています。